ここでは,いよいよ\( \ \mathrm {RLC} \ \)直列回路についてインピーダンスを導出します。
Contents
ベクトル図を使ってインピーダンスを導出
抵抗値\( \ R \ \)の抵抗,インダクタンス\( \ L \ \)のコイル,静電容量\( \ C \ \)のコンデンサが,角周波数\( \ \omega \ \)の交流電源に直列に接続された回路について,インピーダンスを導出します(図\( \ 1 \ \))。
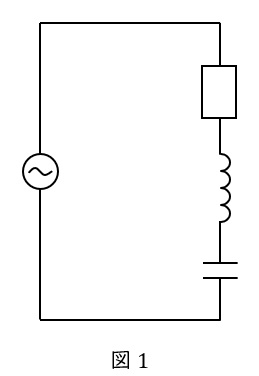
回路図に電圧ベクトルと電流ベクトルを書き込みましょう。
電源電圧を\( \ \dot{V} \ \),抵抗にかかる電圧を\( \ \dot{V_{\mathrm {R}}} \ \),コイルにかかる電圧を\( \ \dot{V_{\mathrm {L}}} \ \),コンデンサにかかる電圧を\( \ \dot{V_{\mathrm {C}}} \ \)とします。
電流を\( \ \dot{I} \ \)とします。直列回路ですから,抵抗にもコイルにもコンデンサ同じ電流が流れます(図\( \ 2 \ \))。
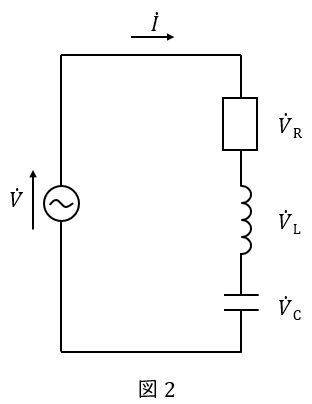
これから\( \ \dot{V} \ \)を\( \ \dot{I} \ \)の式で書くことで,インピーダンスを求めます。
まずは分かることを書きこもう
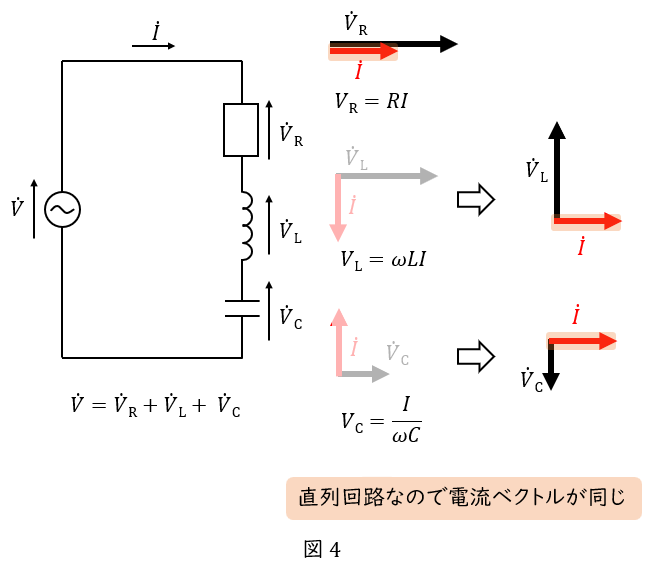
まずは回路図に分かることをどんどん書き込んでいきましょう(図\( \ 3 \ \))。
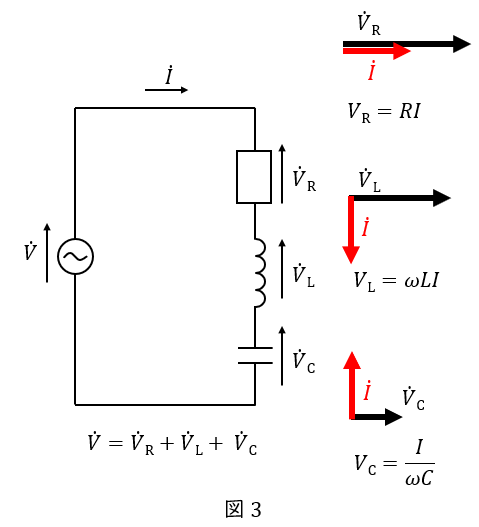
抵抗では,電圧と電流は同相です。電圧の大きさは,\( \ V_{\mathrm {R}}=RI \ \)です。
コイルでは,電流が先,電圧が後で,位相差は\( \ \displaystyle \frac{\pi}{2} \ \)です。
電圧の大きさは,\( \ V_{\mathrm {L}}=\omega L I \ \)です。
コンデンサでは,電圧が先,電流が後で,位相差は\( \ \displaystyle \frac{\pi}{2} \ \)です。
電圧の大きさは,\( \ V_{\mathrm {C}}=\displaystyle \frac{I}{\omega C} \ \)です。
さらに電源電圧のベクトル\( \ \dot{V} \ \)については,以下の式が成立します。
\[
\begin{eqnarray}
\dot{V} = \dot{V_{\mathrm {R}}}+\dot{V_{\mathrm {L}}}+\dot{V_{\mathrm {C}}} \\[ 5pt ]
\end{eqnarray}
\]
このようにして,回路図に分かる情報を書き込みます。
同じベクトルを見つけて向きをそろえる
直列回路ですから,電流ベクトル\( \ \dot{I} \ \)が同じです。
向きをそろえましょう(図\( \ 4 \ \))。
電源電圧のベクトルを計算する
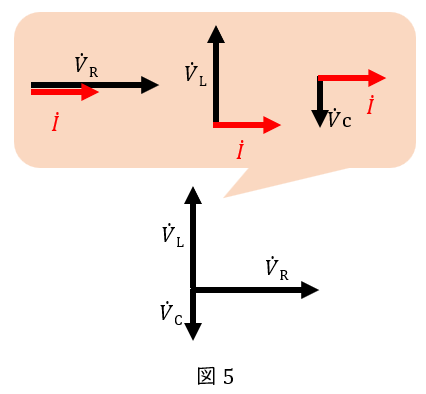
\( \ \dot{V} = \dot{V_{\mathrm {R}}} + \dot{V_{\mathrm {L}}} + \dot{V_{\mathrm {C}}} \ \)ですから,
\( \ 3 \ \)つの電圧ベクトルを足します。
まずは始点をそろえて描きましょう(図\( \ 5 \ \))。
\( \ 3 \ \)つのベクトルを足す方法ですが,まずは\( \ 2 \ \)つのベクトルを足して,それから残った\( \ 1 \ \)つのベクトルを足します(ベクトル①)。
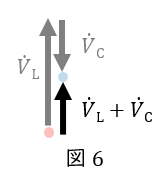
最初に足す\( \ 2 \ \)つのベクトルはどれを選んでもいいのですが,一直線上にあるベクトルがあれば,それを選ぶのが楽です。
今回の場合\( \ \dot{V_{\mathrm {L}}} \ \)と \( \ \dot{V_{\mathrm {C}}} \ \)が一直線上にあるので,これらを足しましょう(図\( \ 6 \ \))。
ここでは\( \ V_{\mathrm {L}} \ \)が\( \ V_{\mathrm {C}} \ \)より大きいと仮定しています。
続いて,残った\( \ \dot{V_{\mathrm {R}}} \ \)と,\( \ \dot{V_{\mathrm {L}}}+\dot{V_{\mathrm {C}}} \ \)を足します。
よって\( \ \dot{V} \ \)は図\( \ 7 \ \)です。
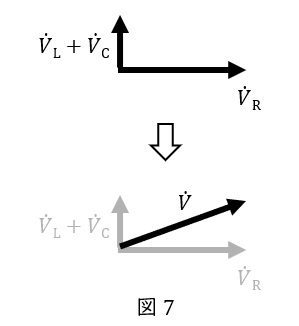
\( \ \dot{V} \ \)の大きさ\( \ V \ \)は,三平方の定理を使って計算します。
ここで,\( \ V_{\mathrm {L}} \ \)と\( \ V_{\mathrm {C}} \ \)の,どちらが大きいかが分かりませんが,
絶対値の記号を使えば,どちらの場合であっても\( \ |V_{\mathrm {L}}-V_{\mathrm {C}}| \ \)と書くことができます(図\( \ 8 \ \))。
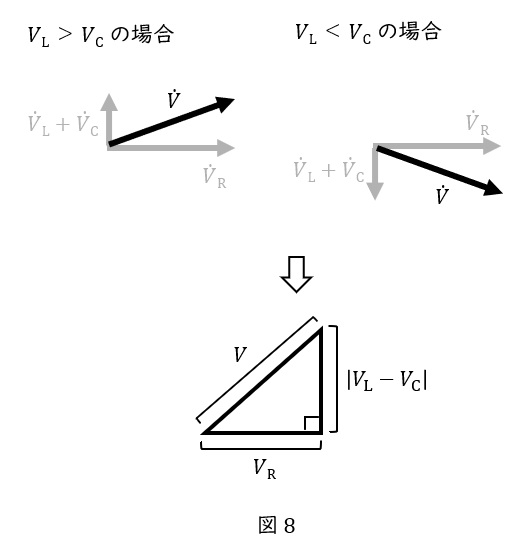
また,三平方の定理を使うときに,絶対値を\( \ 2 \ \)乗することになるので,絶対値記号は外れます。
\[
\begin{eqnarray}
V&=&\sqrt{V_{\mathrm {R}}^2+ ( |V_{\mathrm {L}}-V_{\mathrm {C}} |)^2} \\[ 5pt ]
&=&\sqrt{(RI)^2+\left(\omega L I-\displaystyle \frac{I}{\omega C}\right)^2}\\[ 5pt ]
&=&\sqrt{R^2I^2+\left(\omega L-\displaystyle \frac{1}{\omega C}\right)^2I^2}\\[ 5pt ]
&=&I\sqrt{R^2+\left(\omega L-\displaystyle \frac{1}{\omega C}\right)^2}\\[ 5pt ]
\end{eqnarray}
\]
インピーダンスを計算する
インピーダンス\( \ Z \ \)は電圧を電流で割った値ですから,このようになります。
\[
\begin{eqnarray}
Z&=&\displaystyle \frac{V}{I} \\[ 5pt ]
&=&\displaystyle \frac{I\sqrt{R^2+\left(\omega L-\displaystyle \frac{1}{\omega C}\right)^2}}{I} \\[ 5pt ]
&=&\sqrt{R^2+\left(\omega L-\displaystyle \frac{1}{\omega C}\right)^2}\\[ 5pt ]
\end{eqnarray}
\]
位相差を計算する
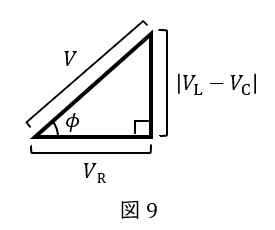
位相差\( \ \phi \ \)も,直角三角形から簡単に導出できます(図\( \ 9 \ \))。
\[
\begin{eqnarray}
\tan \phi =\frac{|V_{\mathrm {L}}-V_{\mathrm {C}}|}{V_{\mathrm {R}}}= \frac{|\omega L I-\displaystyle \frac{I}{\omega C}|}{RI} = \frac{|\omega L -\displaystyle \frac{1}{\omega C}|}{R}\\[ 5pt ]
\end{eqnarray}
\]
ここで,\( \ \phi \ \)はあくまでも位相”差”です。
遅れているのか進んでいるのかは,別途考えましょう。
\( \ V_{\mathrm {L}} > V_{\mathrm {C}} \ \)であれば,電圧は電流に対して進んでいます。
\( \ V_{\mathrm {L}} < V_{\mathrm {C}} \ \)であれば,電圧は電流に対して遅れています。
以上,\( \ \mathrm {RLC} \ \)直列回路についてインピーダンスを導出しました。
ベクトル図に慣れてきたでしょうか?
次回は,並列回路についてインピーダンスを導出します。
考え方の基礎は同じなので,ここまでを理解できた方は,苦労なく理解してもらえると思います。

RECOMMENDこちらの記事も人気です。
-
 ベクトル
ベクトル
【ベクトル⑩】単相2線式送電線と三相3線式送電線の電圧降下の公式をベクト…
-
ベクトル
【ベクトル①】ベクトルとは?ベクトルが同じとはどういうことか?足し算の考…
-
 ベクトル
ベクトル
【ベクトル⑥】RL直列回路のインピーダンスをベクトル図で導出。ベクトルの…
-
ベクトル
【ベクトル④】抵抗・コイル・コンデンサのみの回路とベクトル図。電圧と電流…
-
ベクトル
【ベクトル③】ベクトルが便利な理由と表記方法を解説。交流電源の電圧・電流…
-
ベクトル
【ベクトル⑧】RL並列回路及びRLC並列回路インピーダンスをベクトル図で…
-
ベクトル
【ベクトル】ベクトルとはどのようなもの?学習すべき人と学習項目一覧
-
ベクトル
【ベクトル⑤】RL直列回路(抵抗・コイルの直列回路)のインピーダンスを三…