ここでは,抵抗とコイルの直列回路について,インピーダンスを計算します。
こちらのベクトル⑤では三角関数を,ベクトル⑥ではベクトル図を使います。
ベクトルの便利さを実感できるお話ですので,ぜひ最後までお付き合いください。
\( \ \mathrm {RL} \ \)直列回路とは
抵抗とコイルが直列に接続された回路のことです。
抵抗の抵抗値\( \ R \ \),コイルのインダクタンス\( \ L \ \)から,\( \ \mathrm {RL} \ \)直列回路と呼ばれます。
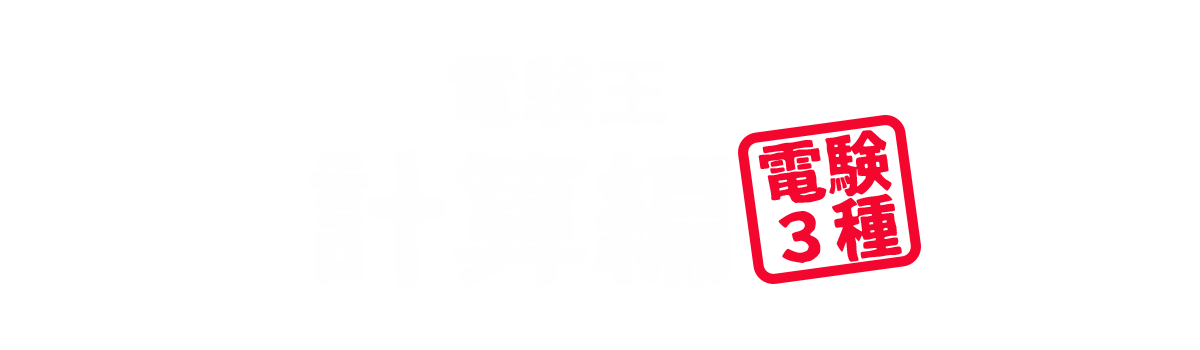
最も単純な\( \ \mathrm {RL} \ \)直列回路は,抵抗とコイルを\( \ 1 \ \)つずつ含む回路です(図\( \ 1 \ \))。
抵抗・コイルの数が増えた場合も,\( \ \mathrm {RL} \ \)直列回路といいます。
インピーダンスとは
端的に言うと”交流回路における抵抗値”なのですが,この説明だとコイルやコンデンサは含まないと誤解を招きそうなので,次のように考えてください。
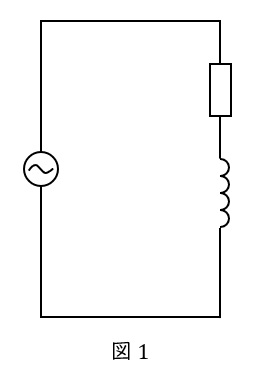
“交流回路の抵抗・コイル・コンデンサを,直流回路に抵抗だけ一つだけ接続されているとみなした場合の,仮想の抵抗値”です(図\( \ 2 \ \))。
抵抗・コイル・コンデンサを含む複雑な交流回路を,大胆にも,抵抗だけの回路とみなすのです。
抵抗だけの回路の場合,抵抗値\( \ R \ \)は,電圧を\( \ V \ \),電流を\( \ I \ \)として下式で表せます(オームの法則)。
\[
\begin{eqnarray}
R=\displaystyle \frac{V}{I} \\[ 5pt ]
\end{eqnarray}
\]
したがって,インピーダンスも同様に,電圧を電流で割ることで算出されます。
電圧の最大値を電流の最大値で割ったもいいですし,電圧の実効値を電流の実効値で割ったも構いません。
とにかく電圧を電流で割ったものであることをおさえてください。
\[
\begin{eqnarray}
インピーダンス=\displaystyle \frac{電圧の最大値}{電流の最大値}=\displaystyle \frac{電圧の実効値}{電流の実効値} \\[ 5pt ]
\end{eqnarray}
\]
通常の抵抗値なら記号は\( \ R \ \),単位は\( \ \mathrm{\Omega} \ \)(オーム)ですが,
インピーダンスは記号は\( \ Z \ \),単位は同じく\( \ \mathrm{\Omega} \ \)です。
インピーダンスは英語で書くと\( \ \mathrm {impedance} \ \)であり,「邪魔をする」という意味の動詞\( \ \mathrm {impede} \ \)の名詞形です。
記号がなぜ\( \ Z \ \)なのかは,諸説あるものの,単純にアルファベットの最後の文字をつかったといわれています。
ではここから,インピーダンスの式を導出します。
このページでは,シンプルに抵抗とコイルのみの回路で考えましょう。
\( \ \mathrm {RL} \ \)直列回路
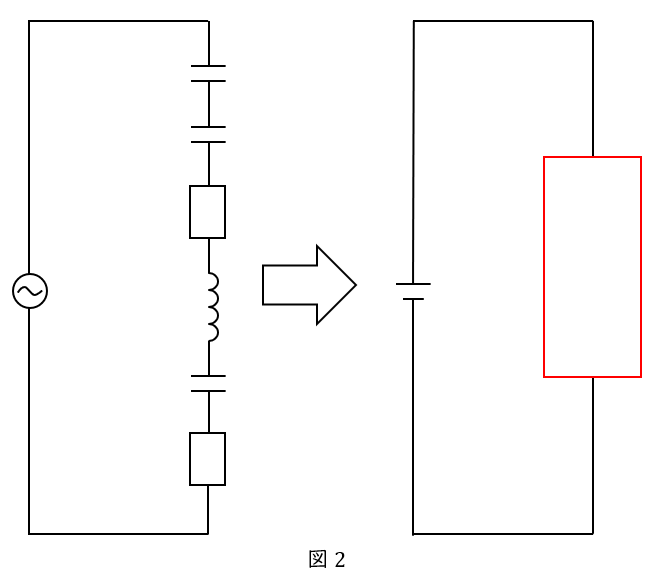
図\( \ 3 \ \)のように抵抗とコイルのみの回路です。
抵抗値が\( \ R \ \)の抵抗と,インダクタンス\( \ L \ \)のコイルが,角周波数\( \ \omega \ \)の交流電源に直列に接続されているとします。
電源電圧を\( \ V \ \),抵抗にかかる電圧を\( \ V_{\mathrm {R}} \ \),コイルにかかる電圧を\( \ V_{\mathrm {L}} \ \)とします。
電流を\( \ I \ \)とします。直列回路ですから,抵抗にもコイルにも同じ電流が流れます。
\( \ I_{\mathrm {R}} \ \)や\( \ I_{\mathrm {L}} \ \)と置く必要はありませんね。
これから\( \ V \ \)を\( \ I \ \)の式で書くことで,インピーダンスを求めます。
インピーダンスとは,回路全体を大きな抵抗が\( \ 1 \ \)つだけの回路だとみなした場合の仮想の抵抗値で,
電圧を電流で割ったものでしたね。
まずは三角関数でインピーダンスを導出し,その後ベクトルを使って導出します。
三角関数の計算は大変で,ベクトルを使った方が便利だと思っていただけると思います。
三角関数で計算するのは大変
ではまず三角関数で導出しましょう。
先に述べた通り,ベクトルの便利さを認識してもらうことが目的なので,
途中の三角関数の計算が分からなくても,大丈夫です。
電流\( \ I \ \)を,次のサインカーブだと仮定します。
\[
\begin{eqnarray}
I=I_0\sin \omega t \\[ 5pt ]
\end{eqnarray}
\]
なぜ電流から始めるかというと,直列回路で抵抗にもコイルにも同じ電流が流れるので,
電流をベースにするのがスムーズだからです。
すると,抵抗にかかる電圧\( \ V_{\mathrm {R}} \ \)は,どうなるでしょうか。
最大値は,抵抗値\( \ R \ \)に電流の最大値\( \ I_0 \ \)をかけたものです。
位相は,抵抗では位相差は発生しませんから,電流と同じです。
以上より抵抗にかかる電圧\( \ V_{\mathrm {R}} \ \)はこちらです。
\[
\begin{eqnarray}
V_{\mathrm {R}} =RI_0\sin \omega t \\[ 5pt ]
\end{eqnarray}
\]
続いてコイルにかかる電圧\( \ V_{\mathrm {L}} \ \)を考えます。
最大値は,インダクタンス\( \ L \ \)に,角周波数\( \ \omega \ \)をかけて,電流の最大値\( \ I_0 \ \)をかけたものです。
位相は,コイルでは電圧が先,電流が後で,位相差は\( \ \displaystyle \frac{\pi}{2} \ \)です。
以上よりコイルにかかる電圧\( \ V_{\mathrm {L}} \ \)はこちらです。
\[
\begin{eqnarray}
V_{\mathrm {L}}=\omega L I_0\sin (\omega t+\displaystyle \frac{\pi}{2}) \\[ 5pt ]
\end{eqnarray}
\]
そして,電源電圧\( \ V \ \)は,抵抗にかかる電圧\( \ V_{\mathrm {R}} \ \)とコイルにかかる電圧\( \ V_{\mathrm {L}} \ \)を足したものです。
\[
\begin{eqnarray}
V=V_{\mathrm {R}}+V_{\mathrm {L}} \\[ 5pt ]
\end{eqnarray}
\]
以上の情報を回路図に書き込むと図\( \ 4 \ \)です。
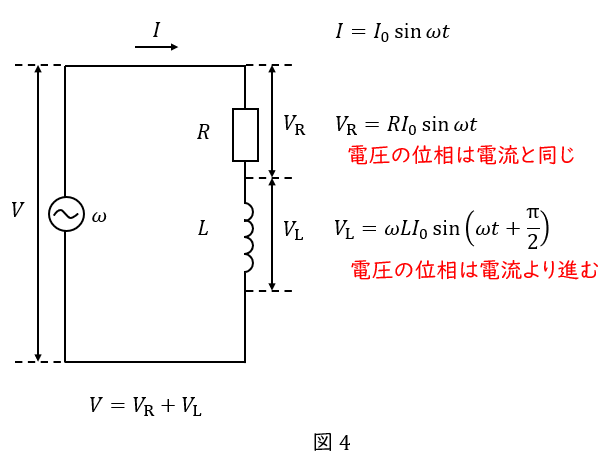
では三角関数の計算にとりかかります。
\[
\begin{eqnarray}
V&=&V_{\mathrm {R}}+V_{\mathrm {L}} \\[ 5pt ]
&=&RI_0\sin \omega t+\omega L I_0 \color{red}{\sin (\omega t+\displaystyle \frac{\pi}{2})} \\[ 5pt ]
\end{eqnarray}
\]
赤字部分に加法定理を使用します。
\[
\begin{eqnarray}
\sin (\omega t+\displaystyle \frac{\pi}{2})&=&\sin \omega t \cos \displaystyle \frac{\pi}{2}+\cos \omega t \sin \displaystyle \frac{\pi}{2} \\[ 5pt ]
&=&\sin \omega t \times 0 +\cos \omega t \times 1 \\[ 5pt ]
&=&\cos \omega t \\[ 5pt ]
\end{eqnarray}
\]
したがって,赤字部分は\( \ \cos \omega t \ \)となるので,
\[
\begin{eqnarray}
V&=&RI_0\sin \omega t+\omega L I_0 \color{red}{\sin (\omega t+\displaystyle \frac{\pi}{2})} \\[ 5pt ]
&=&RI_0\sin \omega t+\omega L I_0 \color{red}{\cos \omega t} \\[ 5pt ]
\end{eqnarray}
\]
続いて,こちらの三角関数の合成公式を使用します。
\[
\begin{eqnarray}
\color{blue}{A\sin \omega t+B \cos \omega t =\sqrt{A^2+B^2}\sin (\omega t+\phi)} \\[ 5pt ]
\end{eqnarray}
\]
ここで,\( \ \phi \ \)は以下の式を満たす角度です。
\[
\begin{eqnarray}
\tan \phi = \frac{B}{A} \\[ 5pt ]
\end{eqnarray}
\]
\( \ V \ \)の式に三角関数の合成公式を適用して,このようになります。
\[
\begin{eqnarray}
V&=&\color{blue}{RI_0\sin \omega t+\omega L I_0 \cos \omega t} \\[ 5pt ]
&=&\color{blue}{\sqrt{(RI_0)^2+(\omega L I_0)^2}\sin (\omega t+\phi)} \\[ 5pt ]
&=&\sqrt{R^2+\omega^2 L^2}I_0\sin (\omega t+\phi) \\[ 5pt ]
\end{eqnarray}
\]
ここで,\( \ \phi \ \)は以下の式を満たす角度です。
\[
\begin{eqnarray}
\tan \phi = \frac{\omega L I_0}{RI_0} = \frac{\omega L}{R}\\[ 5pt ]
\end{eqnarray}
\]
以上をまとめると,\( \ V \ \)と\( \ I \ \)の式はこちらです。
\[
\begin{eqnarray}
V&=&\sqrt{R^2+\omega^2 L^2}I_0\sin (\omega t+\phi) \\[ 5pt ]
I&=&I_0\sin \omega t \\[ 5pt ]
\end{eqnarray}
\]
そして,今何をしたいのかというと,インピーダンスの式を求めたいのでした。
\[
\begin{eqnarray}
インピーダンス=\displaystyle \frac{電圧の最大値}{電流の最大値}\\[ 5pt ]
\end{eqnarray}
\]
式より,電流の最大値は\( \ I_0 \ \),電圧の最大値は\( \ \sqrt{R^2+\omega^2 L^2}I_0 \ \)ですから,インピーダンス\( \ Z \ \)はこちらです。
\[
\begin{eqnarray}
Z&=&\displaystyle \frac{\sqrt{R^2+\omega^2 L^2}I_0}{I_0}\\[ 5pt ]
&=&\sqrt{R^2+\omega^2 L^2}\\[ 5pt ]
\end{eqnarray}
\]
インピーダンスの式がようやく計算できましたね。
なお,この計算で電圧と電流の位相差も分かりました。\( \ \phi \ \)ですね。
\( \ \phi \ \)はこちらの式を満たす角度です。
\[
\begin{eqnarray}
\tan \phi = \frac{\omega L}{R}\\[ 5pt ]
\end{eqnarray}
\]
以上が,三角関数を用いた場合の,インピーダンスと位相差の導出です。かなり大変でしたね。

RECOMMENDこちらの記事も人気です。
-
 ベクトル
ベクトル
【ベクトル⑥】RL直列回路のインピーダンスをベクトル図で導出。ベクトルの…
-
 ベクトル
ベクトル
【ベクトル⑨】対称三相交流のスター結線における線間電圧と相電圧の関係をベ…
-
ベクトル
【ベクトル⑧】RL並列回路及びRLC並列回路インピーダンスをベクトル図で…
-
ベクトル
【ベクトル⑦】RLC直列回路のインピーダンスをベクトル図を描いて導出
-
ベクトル
【ベクトル③】ベクトルが便利な理由と表記方法を解説。交流電源の電圧・電流…
-
ベクトル
【ベクトル②】ベクトルの引き算の考え方。ベクトルの大きさはそのままで向き…
-
ベクトル
【ベクトル④】抵抗・コイル・コンデンサのみの回路とベクトル図。電圧と電流…
-
ベクトル
【ベクトル】ベクトルとはどのようなもの?学習すべき人と学習項目一覧