直列回路に続いて,今回は並列回路についてインピーダンスを導出します。
※なお,並列回路ではアドミタンスという量も登場します。
アドミタンスが何かについては,一度インピーダンスを導出してから,詳しく解説します。
本文では\( \ \mathrm {RL} \ \)並列回路について解説し,練習問題で\( \ \mathrm {RLC} \ \)並列回路の問題を解きます。
考え方の基礎は,直列回路と同じです。ではやってみましょう。
Contents
\( \ \mathrm {RL} \ \)並列回路
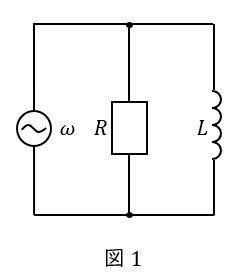
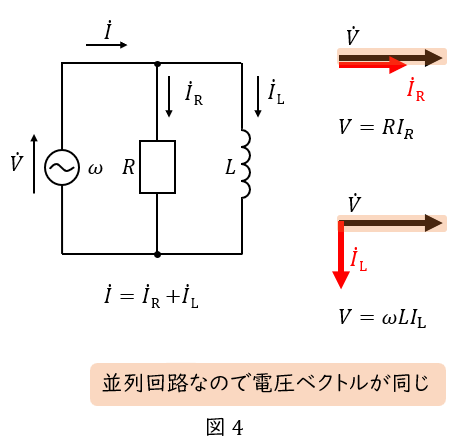
抵抗とコイルが並列接続された回路です(図\( \ 1 \ \))。
抵抗値\( \ R \ \)の抵抗,インダクタンス\( \ L \ \)のコイルが,角周波数\( \ \omega \ \)の交流電源に並列に接続されています。
まずは回路図に電圧ベクトルと電流ベクトルを書き込みましょう。
電源電圧を\( \ \dot{V} \ \)とします。並列回路ですから,抵抗にもコイルにも同じ電圧がかかります。
ですから\( \ \dot{V_{\mathrm {R}}} \ \),\( \ \dot{V_{\mathrm {L}}} \ \)とおく必要はありません。
そして,分岐前の電流を\( \ \dot{I} \ \)とします。抵抗に流れる分を\( \ \dot{I_{\mathrm {R}}} \ \),コイルに流れる分を\( \ \dot{I_{\mathrm {L}}} \ \)とします(図\( \ 2 \ \))。
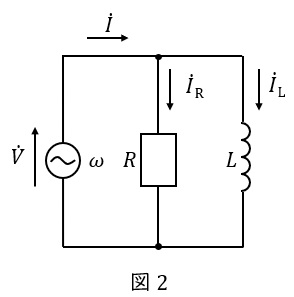
これから\( \ \dot{V} \ \)を\( \ \dot{I} \ \)の式で書くことで,インピーダンスを求めます。
まずは分かることを書きこもう
まずは回路図に分かることを書き込みましょう(図\( \ 3 \ \))。
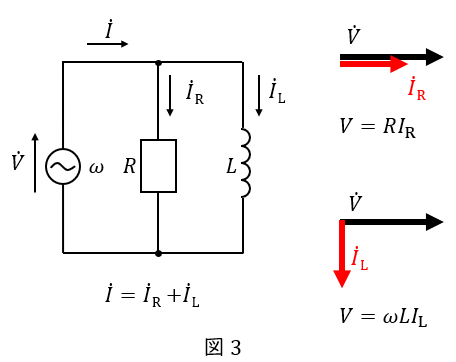
抵抗では,電圧と電流は同相です。電圧と電流の関係は,\( \ V=RI_{\mathrm {R}} \ \)です。
コイルでは,電流が先,電圧が後で,位相差は\( \ \displaystyle \frac{\pi}{2} \ \)です。
電圧と電流の関係は,\( \ V=\omega L I_{\mathrm {L}} \ \)です。
さらに電流ベクトル\( \ \dot{I} \ \)については,以下の式が成立します。
\[
\begin{eqnarray}
\dot{I} = \dot{I_{\mathrm {R}}}+\dot{I_{\mathrm {L}}} \\[ 5pt ]
\end{eqnarray}
\]
このようにして,回路図に分かる情報を書き込みます。
同じベクトルを見つけて向きをそろえる
並列回路ですから,電圧ベクトル\( \ \dot{V} \ \)が同じです。
向きはそろっていますから,そのままで大丈夫です(図\( \ 4 \ \))。
電流ベクトルを計算する
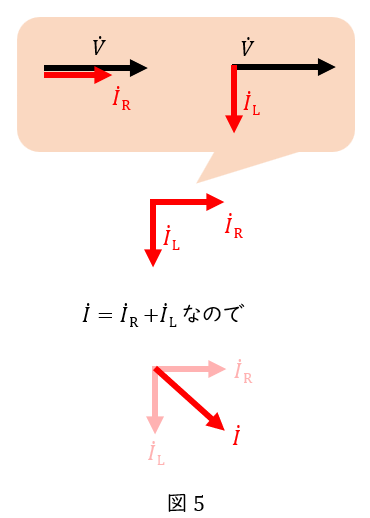
\( \ \dot{I} = \dot{I_{\mathrm {R}}} + \dot{I_{\mathrm {L}}}\ \)ですから,\( \ 2 \ \)つの電流ベクトルを足します。
始点をそろえて,平行四辺形の対角線を描くのでしたね(ベクトル①)。
※今回の場合は位相差が\( \ \displaystyle \frac{\pi}{2} \ \)なので長方形になります。
よって\( \ \dot{I} \ \)は図\( \ 5 \ \)となります。
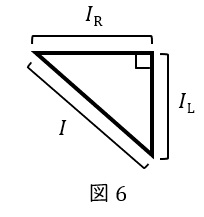
\( \ \dot{I} \ \)の大きさ\( \ I \ \)は,三平方の定理を使って計算できます(図\( \ 6 \ \))。
\[
\begin{eqnarray}
I&=&\sqrt{I_{\mathrm {R}}^2+I_{\mathrm {L}}^2} \\[ 5pt ]
\end{eqnarray}
\]
ここで,抵抗における電圧と電流の関係は\( \ V=RI_{\mathrm {R}} \ \)ですから,\( \ 電流= \ \)の形に直すと,
\[
\begin{eqnarray}
I_{\mathrm {R}}=\displaystyle \frac{V}{R} \\[ 5pt ]
\end{eqnarray}
\]
そして,コイルにおける電圧と電流の関係は\( \ V=\omega L I_{\mathrm {L}} \ \)ですから,
\[
\begin{eqnarray}
I_{\mathrm {L}}=\displaystyle \frac{V}{\omega L} \\[ 5pt ]
\end{eqnarray}
\]
これらを代入します。
\[
\begin{eqnarray}
I&=&\sqrt{I_{\mathrm {R}}^2+I_{\mathrm {L}}^2} \\[ 5pt ]
&=&\sqrt{\left(\displaystyle \frac{V}{R}\right)^2+\left(\displaystyle \frac{V}{\omega L}\right)^2} \\[ 5pt ]
&=&\sqrt{V^2\left(\displaystyle \frac{1}{R}\right)^2+V^2\left(\displaystyle \frac{1}{\omega L}\right)^2} \\[ 5pt ]
&=&V\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}\right)^2} \\[ 5pt ]
\end{eqnarray}
\]
インピーダンスを計算する
インピーダンス\( \ Z \ \)は電圧を電流で割った値ですから,このようになります。
\[
\begin{eqnarray}
Z&=&\displaystyle \frac{V}{I} \\[ 5pt ]
&=&\displaystyle \frac{V}{V\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}\right)^2}} \\[ 5pt ]
&=&\displaystyle \frac{1}{\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}\right)^2}} \\[ 5pt ]
\end{eqnarray}
\]
位相差を計算する
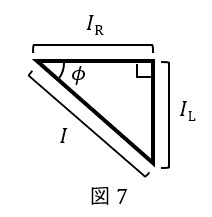
位相差\( \ \phi \ \)も,直角三角形から簡単に導出できます(図\( \ 7 \ \))。
\[
\begin{eqnarray}
\tan \phi =\frac{I_{\mathrm {L}}}{I_{\mathrm {R}}}
= \displaystyle \frac{\displaystyle \frac{V}{\omega L}}{\displaystyle \frac{V}{R} }
= \displaystyle \frac{\displaystyle \frac{1}{\omega L}}{\displaystyle \frac{1}{R} }
= \displaystyle \frac{R}{\omega L} \\[ 5pt ]
\end{eqnarray}
\]
抵抗は位相差なし,コイルは電圧が先,電流が後です。
ですから抵抗とコイルの回路では,電圧が先,電流が後です。
並列回路では電圧が共通なので,電圧を基準として,”電流は電圧より遅れる”と表現をするのが良いでしょう。
以上より,位相差についての解答はこうなります。
電流は電圧に対して\( \ \phi \ \)だけ遅れる。
\( \ \phi \ \)とは下式を満たす角度。
\[
\begin{eqnarray}
\tan \phi = \displaystyle \frac{R}{\omega L} \\[ 5pt ]
\end{eqnarray}
\]
以上,抵抗とコイルの並列回路についてインピーダンスと位相差を計算することができました。
“電流の流れやすさ”を表す量ーアドミタンスー
もう一度インピーダンス\( \ Z \ \)を見てみましょう。
\[
\begin{eqnarray}
Z&=&\displaystyle \frac{1}{\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}\right)^2}} \\[ 5pt ]
\end{eqnarray}
\]
分数の中に分数が入った,複雑な式ですね。
こうなる理由はもちろん,オームの法則で,\( \ 電流=電圧÷抵抗 \ \)だからです。
インピーダンス\( \ Z \ \)はベクトル⑤で説明した通り,”電流の流れにくさ”を表すもので,回路全体を把握するのに便利な量ですが,並列回路の場合は複雑な式になってしまいます。
そこで,”流れにくさ”と逆の量を定義します。つまり”電流の流れやすさ”です。
これをアドミタンスといい,記号は\( \ Y \ \),インピーダンスの逆数となります。
\[
\begin{eqnarray}
Y&=&\displaystyle \frac{1}{Z}\\[ 5pt ]
\end{eqnarray}
\]
アドミタンスは英語で書くと\( \ \mathrm {admittance} \ \)であり,「受け入れ」「入場許可」という意味の英単語です。動詞形の\( \ \mathrm {admit} \ \)なら,「受け入れる」「認める」という意味です。
記号がなぜ\( \ Y \ \)なのかですが,アドミタンスの\( \ \mathrm {A} \ \)はアンペアで使われているので,単純に残ったアルファベットだったといわれています。
単位については,インピーダンスの単位が\( \ \mathrm{\Omega} \ \)(オーム)ですから,アドミタンスの単位は\( \ \displaystyle \frac{1}{\mathrm{\Omega}} \ \)となりますが,この単位のことを\( \ \mathrm{S} \ \)と表します。
読み方は”ジーメンス”です。
日本人としてはなぜジーメンスが\( \ \mathrm{S} \ \)なのか分かりませんよね。
これは,ドイツの物理学者の名前が由来です。\( \ \mathrm{siemens} \ \)と書いてジーメンスと読む名前なのです。
並列回路ではアドミタンスを使うとシンプル
アドミタンスは回路全体の”電流の流れやすさ”を表す量ですから\( \ 電流=アドミタンス \times 電圧 \ \)です。
今回の\( \ \mathrm {RL} \ \)並列回路でいえば,
\[
\begin{eqnarray}
I&=&V\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}\right)^2} \\[ 5pt ]
\end{eqnarray}
\]
ですから,アドミタンス\( \ Y \ \)は次の式で表せます。
\[
\begin{eqnarray}
Y&=&\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}\right)^2} \\[ 5pt ]
\end{eqnarray}
\]
並列回路では,アドミタンスを使うことにより,計算が楽になります。
以上,\( \ \mathrm {RL} \ \)並列回路に対して,ベクトル図を使って,インピーダンスおよびアドミタンスを導出しました。
アドミタンスの話は直列回路には出てこないので,難しく感じたかもしれません。
しかし,インピーダンスを出すまでの過程は,直列回路と同じ考え方です。
ベクトル図を使って解いていきましょう。
では最後に,練習問題として,\( \ \mathrm {RLC} \ \)並列回路のアドミタンスを,ベクトル図を使って求めてみましょう。
練習問題
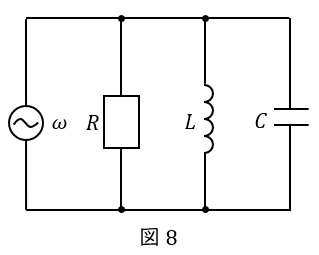
抵抗値\( \ R \ \)の抵抗,インダクタンス\( \ L \ \)のコイル,静電容量\( \ C \ \)のコンデンサが,角周波数\( \ \omega \ \)の交流電源に並列に接続された回路について,アドミタンスを導出しましょう(図\( \ 8 \ \))。
まずは回路図に電圧ベクトルと電流ベクトルを書き込みましょう。
電源電圧を\( \ \dot{V} \ \)とします。並列回路ですから,抵抗にもコイルにもコンデンサにも同じ電圧がかかります。
そして,分岐前の電流を\( \ \dot{I} \ \)とします。抵抗に流れる分を\( \ \dot{I_{\mathrm {R}}} \ \),コイルに流れる分を\( \ \dot{I_{\mathrm {L}}} \ \),コンデンサに流れる分を\( \ \dot{I_{\mathrm {C}}} \ \)とします(図\( \ 9 \ \))。
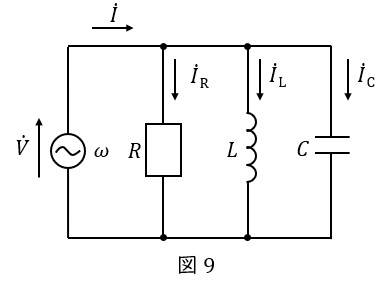
これから\( \ \dot{I} \ \)を\( \ \dot{V} \ \)の式で書くことで,アドミタンスを求めます。
回路図に分かることを書き込みます(図\( \ 10 \ \))。
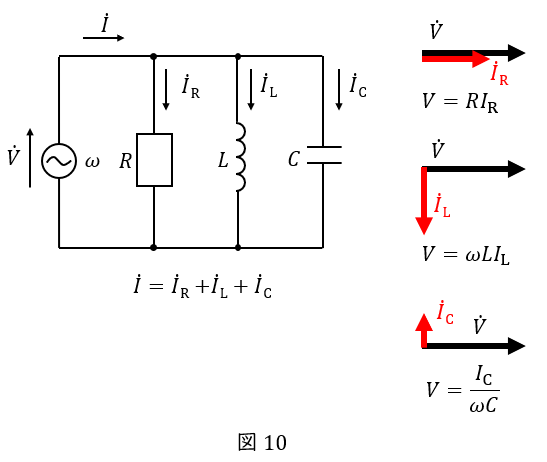
抵抗では,電圧と電流は同相で,\( \ V=RI_{\mathrm {R}} \ \)です。
コイルでは,電流が先,電圧が後で,位相差は\( \ \displaystyle \frac{\pi}{2} \ \)です。
電圧と電流の関係は,\( \ V=\omega L I_{\mathrm {L}} \ \)です。
コンデンサでは電圧が先,電流が後で,位相差は\( \ \displaystyle \frac{\pi}{2} \ \)です。
電圧と電流の関係は,\( \ V=\displaystyle \frac{I_{\mathrm {C}}}{\omega C} \ \)です。
さらに電流ベクトル\( \ \dot{I} \ \)については,以下の式が成立します。
\[
\begin{eqnarray}
\dot{I} = \dot{I_{\mathrm {R}}}+\dot{I_{\mathrm {L}}}+\dot{I_{\mathrm {C}}} \\[ 5pt ]
\end{eqnarray}
\]
回路図に分かることを書きこんだら,ベクトルの向きを確認します。
並列回路ですから,電圧ベクトル\( \ \dot{V} \ \)が同じです。
電圧ベクトルの向きは,既にそろっていますから,図\( \ 10 \ \)はそのままで大丈夫です。
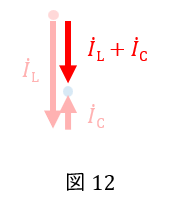
これから\( \ 3 \ \)つの電流ベクトルを足します(図\( \ 11 \ \))。
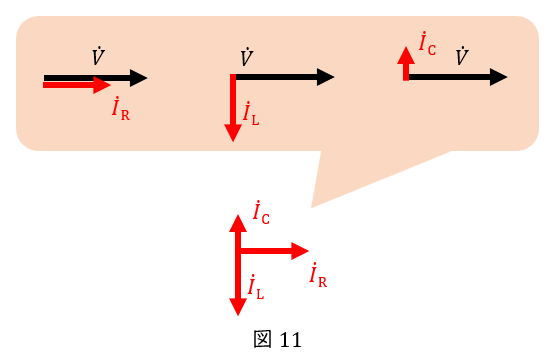
まずは\( \ 2 \ \)つのベクトルを足して,それから残った\( \ 1 \ \)つのベクトルを足します(ベクトル①)。
最初に足す\( \ 2 \ \)は,一直線上にある\( \ \dot{I_{\mathrm {L}}} \ \)と \( \ \dot{I_{\mathrm {C}}} \ \)とするのが楽です。(図\( \ 12 \ \))。
ここでは\( \ I_{\mathrm {L}} \ \)が\( \ I_{\mathrm {C}} \ \)より大きいと仮定しています。
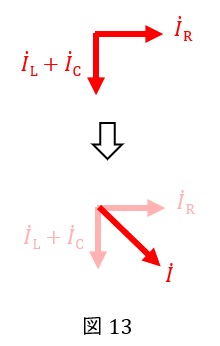
続いて,残った\( \ \dot{I_{\mathrm {R}}} \ \)と,\( \ \dot{I_{\mathrm {L}}}+\dot{I_{\mathrm {C}}} \ \)を足して,\( \ \dot{I} \ \)は図\( \ 13 \ \)です。
\( \ \dot{I} \ \)の大きさ\( \ I \ \)は,三平方の定理を使って計算します(図\( \ 14 \ \))。
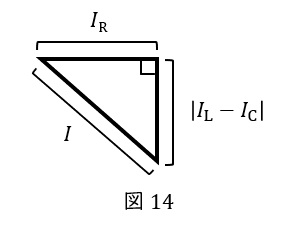
\[
\begin{eqnarray}
I&=&\sqrt{I_{\mathrm {R}}^2+ |V_{\mathrm {L}}-V_{\mathrm {C}}|^2} \\[ 5pt ]
\end{eqnarray}
\]
ここで,抵抗・コイル・コンデンサにおける電流の式はこのようになります。
\[
\begin{eqnarray}
I_{\mathrm {R}}=\displaystyle \frac{V}{R} \\[ 5pt ]
\end{eqnarray}
\]
\[
\begin{eqnarray}
I_{\mathrm {L}}=\displaystyle \frac{V}{\omega L} \\[ 5pt ]
\end{eqnarray}
\]
\[
\begin{eqnarray}
I_{\mathrm {C}}=\omega C V \\[ 5pt ]
\end{eqnarray}
\]
これらを代入します。
\[
\begin{eqnarray}
I&=&\sqrt{I_{\mathrm {R}}^2+ |V_{\mathrm {L}}-V_{\mathrm {C}}|^2}\\[ 5pt ]
&=&\sqrt{\left(\displaystyle \frac{V}{R}\right)^2+\left(\displaystyle \frac{V}{\omega L}-\omega CV\right)^2} \\[ 5pt ]
&=&V\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}-\omega C\right)^2} \\[ 5pt ]
\end{eqnarray}
\]
アドミタンス\( \ Y \ \)は”電流の流れやすさ”を表す量であり,\( \ 電流=アドミタンス \times 電圧 \ \)ですから,上式と比較してこのようになります。
\[
\begin{eqnarray}
Y&=&\sqrt{\left(\displaystyle \frac{1}{R}\right)^2+\left(\displaystyle \frac{1}{\omega L}-\omega C\right)^2} \\[ 5pt ]
\end{eqnarray}
\]
位相差\( \ \phi \ \)も,直角三角形から簡単に導出できます(図\( \ 15 \ \))。
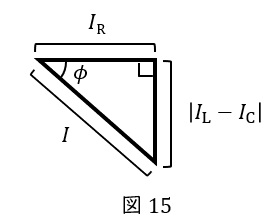
\( \ \phi \ \)は下式を満たす位相となります。
\[
\begin{eqnarray}
\tan \phi =\frac{|I_{\mathrm {L}}-I_{\mathrm {C}}|}{I_{\mathrm {R}}}
=\frac{|\displaystyle \frac{V}{\omega L}-\omega CV|}{\displaystyle \frac{V}{R}}
=\frac{|\displaystyle \frac{1}{\omega L}-\omega CV|}{\displaystyle \frac{1}{R}}
=R|\displaystyle \frac{1}{\omega L}-\omega CV|\\[ 5pt ]
\end{eqnarray}
\]
ここで,\( \ \phi \ \)はあくまでも位相”差”です。
遅れているのか進んでいるのかは,別途考えましょう。
\( \ I_{\mathrm {L}} > I_{\mathrm {C}} \ \)であれば,コイルの影響の方が強いので,電流は電圧に対して遅れます。
\( \ I_{\mathrm {L}} < I_{\mathrm {C}} \ \)であれば,コンデンサの影響の方が強いので,電流は電圧に対して進みます。
以上,ベクトル図を用いることで,\( \ \mathrm {RLC} \ \)直列回路と並列回路について電圧と電流の関係を導きました。
これを三角関数で解くと非常に大変ですから,ベクトル図の便利さを感じていただけたのではないでしょうか。

RECOMMENDこちらの記事も人気です。
-
 ベクトル
ベクトル
【ベクトル③】ベクトルが便利な理由と表記方法を解説。交流電源の電圧・電流…
-
ベクトル
【ベクトル⑦】RLC直列回路のインピーダンスをベクトル図を描いて導出
-
ベクトル
【ベクトル⑩】単相2線式送電線と三相3線式送電線の電圧降下の公式をベクト…
-
ベクトル
【ベクトル②】ベクトルの引き算の考え方。ベクトルの大きさはそのままで向き…
-
ベクトル
【ベクトル④】抵抗・コイル・コンデンサのみの回路とベクトル図。電圧と電流…
-
ベクトル
【ベクトル】ベクトルとはどのようなもの?学習すべき人と学習項目一覧
-
ベクトル
【ベクトル①】ベクトルとは?ベクトルが同じとはどういうことか?足し算の考…
-
 ベクトル
ベクトル
【ベクトル⑥】RL直列回路のインピーダンスをベクトル図で導出。ベクトルの…