【問題】
【難易度】★★★★☆(やや難しい)
図1の\( \ 1 \ \)機無限大母線系統における過渡安定性とその向上対策について,以下の問に答えよ。慣性定数を\( \ M \ \),発電機の機械的入力を\( \ P_{\mathrm {m}} \ \),発電機出力を\( \ P_{\mathrm {e}} \ \),発電機端の電圧を\( \ V_{\mathrm {s}}∠\delta \ \),送電線のインピーダンスを\( \ \mathrm {j}X \ \),無限大母線の電圧を\( \ V_{\mathrm {r}}∠0 \ \)とする。なお,\( \ \delta \ \)は\( \ \mathrm {[rad]} \ \),\( \ M \ \)は\( \ \mathrm {[{sec}^{2} / rad]} \ \)で,その他は\( \ \mathrm {[p.u.]} \ \)で表されている。
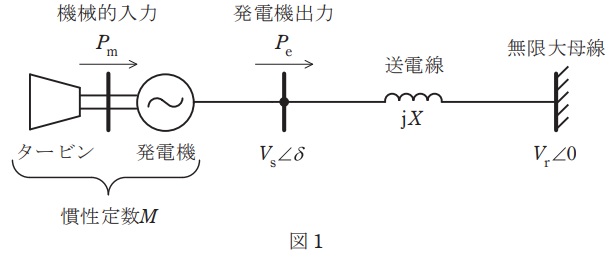
(1) 発電機の動揺方程式の\( \ \displaystyle M\frac {\mathrm {d}^{2}\delta }{\mathrm {d}t^{2}} \ \)を\( \ P_{\mathrm {m}} \ \),\( \ P_{\mathrm {e}} \ \)で,\( \ P_{\mathrm {e}} \ \)を\( \ V_{\mathrm {s}} \ \),\( \ V_{\mathrm {r}} \ \),\( \ X \ \)及び\( \ \delta \ \)で表し,送電線で地絡などの故障が起きた直後の\( \ P_{\mathrm {m}} \ \)と\( \ P_{\mathrm {e}} \ \)の変化による\( \ \delta \ \)への影響を\( \ 50 \ \)字程度以内で説明せよ。また,\( \ M \ \),\( \ \delta \ \),\( \ X \ \)の各々に関して過渡安定性が悪化する条件を,各変数について大小で簡潔に示せ。
(2) 送電線故障による電力系統の過渡安定性を向上するための具体的な方策について,故障中の\( \ P_{\mathrm {e}} \ \)の観点から三つ簡潔に示せ。
(3) 過渡安定性を向上するための\( \ P_{\mathrm {m}} \ \)に関する具体的な方策として,電源制限による過渡安定性の改善効果を,平行\( \ 2 \ \)回線送電線に地絡などの故障が発生した場合を示す図2の電力相差角曲線を用いて,簡潔に説明せよ。また,電源制限を実施する場合の留意事項と対策を\( \ 100 \ \)字程度以内で説明せよ。

(4) 平行\( \ 2 \ \)回線送電線では,\( \ 2 \ \)回線\( \ \times 3 \ \)相の計\( \ 6 \ \)相に発生する故障は様々な組み合わせがあるが,超高圧送電線における高速による多相再閉路方式において,同相での\( \ 2 \ \)回線地絡故障\( \ \left( 1\phi \mathrm {G2LG} \right) \ \)が,\( \ 1 \ \)回線\( \ 3 \ \)相地絡故障\( \ \left( 3\phi \mathrm {G3LG} \right) \ \)よりも過渡安定性が厳しくなる理由を故障中,故障除去後の\( \ P_{\mathrm {e}} \ \)の観点で\( \ 200 \ \)字程度以内で説明せよ。なお,説明は,図2の電力相差角曲線を用いてもよい。
【ワンポイント解説】
発電機の過渡安定性に関する問題です。
同期発電機において,故障発生前は機械的入力と電気的出力が平衡しているので,安定して回転していますが,故障が発生すると電気的出力が大きく低下するため,回転軸には大きな力が加わります。
本問は専門性が高くほとんどの受験生にとって完答は厳しい問題であるため,本問を選択する場合には部分点狙いで良いかと思います。
1.送電電力\( \ P \ \mathrm {[W]} \ \)
送電端電圧を\( \ V_{\mathrm {s}} \ \mathrm {[V]} \ \),受電端電圧を\( \ V_{\mathrm {r}} \ \mathrm {[V]} \ \),送電線のリアクタンスを\( \ X \ [\Omega ] \ \),\( \ V_{\mathrm {s}} \ \)と\( \ V_{\mathrm {r}} \ \)の相差角を\( \ \delta \ \mathrm {[rad]} \ \)とすると,送電電力\( \ P \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P&=&\frac {V_{\mathrm {s}}V_{\mathrm {r}}}{X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
となります。
2.発電機の動揺方程式
慣性定数を\( \ M \ \),発電機の機械的入力を\( \ P_{\mathrm {m}} \ \),発電機出力を\( \ P_{\mathrm {e}} \ \)とすると,発電機の回転角速度\( \ \omega \ \)との間には,
\[
\begin{eqnarray}
M\frac {\mathrm {d}\omega }{\mathrm {d}t}&=&P_{\mathrm {m}}-P_{\mathrm {e}} \\[ 5pt ]
\end{eqnarray}
\]
の関係があり,相差角を\( \ \delta \ \)とすれば,\( \ \displaystyle \omega =\frac {\mathrm {d}\delta }{\mathrm {d}t} \ \)であるから,
\[
\begin{eqnarray}
M\frac {\mathrm {d}^{2}\delta }{\mathrm {d}t^{2}}&=&P_{\mathrm {m}}-P_{\mathrm {e}} \\[ 5pt ]
\end{eqnarray}
\]
となり,これを動揺方程式といいます。
3.等面積法
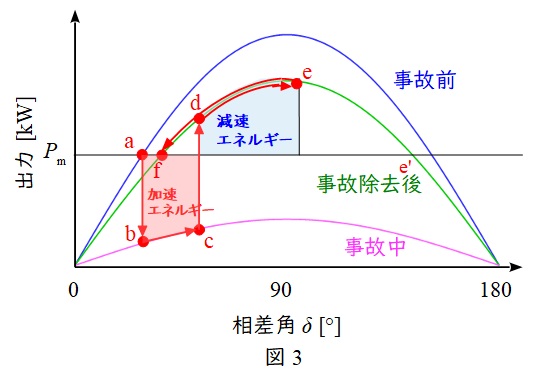
過渡安定度のメカニズムの説明には,送電電力\( \ P \ \)と相差角\( \ \delta \ \)の関係\( \ \left( \displaystyle P=\frac {V_{\mathrm {s}}V_{\mathrm {r}}}{x}\sin \delta \right) \ \)を表す図3のような\( \ P-\delta \ \)曲線による等面積法が用いられます。
図3の\( \ \mathrm {a} \ \)で安定運転していた発電機が事故が発生すると,多量の無効電力が流れ,\( \ \mathrm {b} \ \)点に移動します。発電機への機械的な入力\( \ P_{\mathrm {m}} \ \)はほとんど変化しないため,事故を除去する\( \ \mathrm {c} \ \)点まで発電機は加速し,事故除去後,線路は\( \ 1 \ \)回線なくなる分事故前よりリアクタンスが大きくなるため,\( \ P-\delta \ \)曲線は緑線になり,\( \ \mathrm {d} \ \)点に移動します。その後,発電機は減速エネルギーが働き始め,\( \ \mathrm {e} \ \)点まで進むと減速を開始し,元の出力と同じ\( \ \mathrm {f} \ \)点まで行くと発電機は安定します。減速エネルギーが足りず,\( \ \mathrm {e}^{\prime } \ \)点まで行ってしまうと脱調します。
したがって,加速エネルギーを大きくしないためには,超速応励磁方式を採用し\( \ \mathrm {b} \ \)点から\( \ \mathrm {c} \ \)点までの距離を短くすることが効果的となります。
【解答】
(1)発電機の動揺方程式の\( \ \displaystyle M\frac {\mathrm {d}^{2}\delta }{\mathrm {d}t^{2}} \ \),故障が起きた直後の\( \ \delta \ \)への影響,\( \ M \ \),\( \ \delta \ \),\( \ X \ \)の各々に関して過渡安定性が悪化する条件
(ポイント)
・ワンポイント解説「1.送電電力\( \ P \ \mathrm {[W]} \ \)」及び「2.発電機の動揺方程式」から,各影響について考察すると良いです。
・故障が起きた直後は\( \ P_{\mathrm {m}} \ \)はほとんど変化しませんが,\( \ P_{\mathrm {e}} \ \)が大きく減少することになります。
(試験センター解答)
発電機の動揺方程式は次式で表される。
\[
\begin{eqnarray}
M\frac {\mathrm {d}^{2}\delta }{\mathrm {d}t^{2}}&=&P_{\mathrm {m}}-P_{\mathrm {e}} \\[ 5pt ]
\end{eqnarray}
\]
また,\( \ P_{\mathrm {e}} \ \)は次式で表される。
\[
\begin{eqnarray}
P_{\mathrm {e}}&=&\frac {V_{\mathrm {s}}V_{\mathrm {r}}}{X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
\( \ P_{\mathrm {m}} \ \)は短時間では変化しないが,\( \ P_{\mathrm {e}} \ \)は低下するため加速し,無限大母線の発電機との回転速度に差が生じ,\( \ \delta \ \)が拡大する。
過渡安定性が悪化する条件は,
・\( \ M \ \)が小さいこと
・初期の\( \ \delta \ \)が大きいこと
・\( \ X \ \)が大きいこと
である。
(2)送電線故障による電力系統の過渡安定性を向上するための具体的な方策
(ポイント)
・ワンポイント解説「3.等面積法」における加速エネルギーを低下させる方法を記載すると良いです。
・電圧を高くする,\( \ X \ \)を低下させる,事故除去を早める対策を打つのが有効となります。
(試験センター解答)
発電機加速の抑制策として,\( \ P_{\mathrm {e}} \ \)を加速時に大きくすること,故障除去を早くすることが必要である。具体的な対策方法は以下が挙げられる。(以下から\( \ 3 \ \)点)
\( \ P_{\mathrm {e}} \ \)を加速時に大きくする具体的な対策方法
・制動抵抗制御\( \ \mathrm {\left( SDR\right) } \ \)
・超速応励磁で\( \ V_{\mathrm {s}} \ \)を高める。
・励磁装置頂上電圧を引き上げる。
・調相設備で発電機と無限大母線の間の電圧を高める。
・以下による\( \ X \ \)の低下。
・系統電圧階級の引き上げ
・直列コンデンサの挿入
・多回線化,ループ化,中間開閉所の設置
故障除去を早くする具体的な対策方法
・保護リレー及び遮断器の高速度化
(3)電源制限による過渡安定性の改善効果と実施する場合の留意事項と対策
(ポイント)
・電源制限とは,保護リレー動作等により自動的に電源の遮断もしくは出力制御を行うことをいいます。
・電源制限を行うことにより機械的入力\( \ P_{\mathrm {m}} \ \)を低下させ,減速エネルギーを増加させることができるようになります。
(試験センター解答)
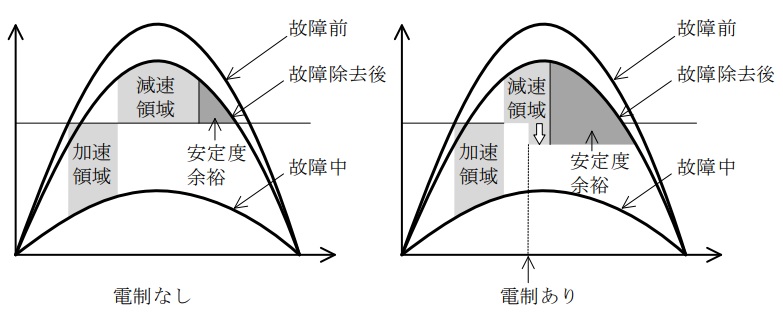
故障除去後の機械的入力を抑制することで過渡安定性が向上する。
電制により,周波数の低下や電圧上昇・低下が生じる可能性に留意が必要である。そのため,電制後の需給バランスに配慮した制御や,調相設備などの開閉による無効電力制御を合わせて実施する。
(4)同相での\( \ 2 \ \)回線地絡故障\( \ \left( 1\phi \mathrm {G2LG} \right) \ \)が,\( \ 1 \ \)回線\( \ 3 \ \)相地絡故障\( \ \left( 3\phi \mathrm {G3LG} \right) \ \)よりも過渡安定性が厳しくなる理由
(ポイント)
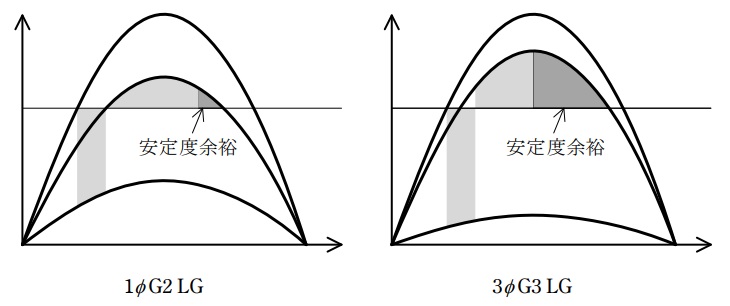
・一般に\( \ 2 \ \)回線地絡故障\( \ \left( 1\phi \mathrm {G2LG} \right) \ \)の方が,\( \ 1 \ \)回線\( \ 3 \ \)相地絡故障\( \ \left( 3\phi \mathrm {G3LG} \right) \ \)よりも事故時の電力相差角曲線は大きくなり,加速エネルギーは小さくなりますが,事故除去後の電力相差角曲線は小さくなり,減速エネルギーも小さくなります。
・高速による多相再閉路方式においては,事故除去及び再閉路は高速で行われるため,加速エネルギー以上に減速エネルギーの影響を大きく受けるようになります。
(試験センター解答)
故障中の電力相差角曲線\( \ \left( P_{\mathrm {e}} \right) \ \)は,\( \ 1\phi \mathrm {G2LG} \ \)の方が\( \ 3\phi \mathrm {G3LG} \ \)よりも大きくなり,加速領域は小さくなる方向である。他方,故障除去後の電力相差角曲線\( \ \left( P_{\mathrm {e}} \right) \ \)は\( \ 1 \ \)相が欠相状態となるため,\( \ 1 \ \)回線\( \ 3 \ \)相開放よりも送電電力は低下するため,減速領域は小さくなる方向である。
故障除去は高速\( \ \left( 3~4 \right. \ \)サイクル程度\(\left. \right) \ \)で行い,再閉路は\( \ 1 \ \)秒程度で行うため,\( \ 1\phi \mathrm {G2LG} \ \)の減速領域の減少の影響が大きく,\( \ 3\phi \mathrm {G3LG} \ \)よりも過渡安定性が厳しくなる。





















 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん