【問題】
【難易度】★★★☆☆(普通)
次の文章は,誘導機の二次励磁方式に関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる最も適切なものを解答群の中から選べ。
風力発電には,誘導発電機が用いられることがある。かご形の誘導発電機を用いた方式はブラシが必要なく,構造が単純であるが,風車の回転速度を商用系統の周波数\( \ f_{1} \ \)に対応した速度にする必要がある。一方,巻線形誘導発電機を用いれば,二次抵抗を外部から制御することにより滑り\( \ s \ \)を調節して同期速度の\( \ 100~110 \ \mathrm {%} \ \)程度の範囲で回転速度が可変可能である。しかし,これらの方式では,いずれも系統への併入時の突入電流を制限する\( \ \fbox { (1) } \ \)が一般に用いられる。
巻線形誘導機の二次側をインバータにより\( \ \fbox { (2) } \ \)の交流で励磁すれば,更に広い範囲での回転速度の範囲で発電が可能である。これを二次励磁方式という。
今,誘導機において,一次側から二次側に電磁誘導によって供給される電力(同期ワット)を\( \ P_{2} \ \)とする。このときの二次銅損は一般に\( \ \fbox { (3) } \ \)で表される。
しかし,二次励磁方式を用いる場合,\( \ \fbox { (3) } \ \)として表される電力の大半がインバータから供給される。
二次励磁方式の発電機として動作している場合を損失を無視して考える。回転子角速度\( \ \omega _{2} \ \)が電源角周波数\( \ \omega _{1} \ \)より大きい場合,インバータは滑りによる電力分を吸収することになり,滑りは\( \ \fbox { (4) } \ \)となる。このとき,双方向電力変換可能なインバータであれば電力を電源に返還することになり,誘導機は電源に周波数\( \ f_{1} \ \)の同期ワット\( \ P_{2} \ \)の電力を供給することになる。一方,滑りが\( \ \fbox { (5) } \ \)であっても,風車による機械的な動力\( \ \fbox { (6) } \ \)とインバータの電力の和が電源に供給される。
〔問5の解答群〕
\[
\begin{eqnarray}
&(イ)& s<0 &(ロ)& 1-s &(ハ)& s>1 \\[ 5pt ]
&(ニ)& 高周波 &(ホ)& s>0 &(ヘ)& 矩形波 \\[ 5pt ]
&(ト)& s=1 &(チ)& ソフトスタート装置 &(リ)& \frac {\left( 1-s\right) ^{2}}{s}P_{2} \\[ 5pt ]
&(ヌ)& 滑り周波数 &(ル)& \frac {\left( 1-s\right) }{s}P_{2} &(ヲ)& \frac {P_{2}}{\omega } \\[ 5pt ]
&(ワ)& 継電器 &(カ)& P_{2} &(ヨ)& s=0 \\[ 5pt ]
&(タ)& sP_{2} &(レ)& 進相コンデンサ &(ソ)& \left( 1-s\right) P_{2} \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
誘導発電機の二次励磁方式に関する問題です。
専門書や論文等を読み解けば風力発電の二次励磁方式の内容も出てきますが,電験としては誘導発電機の特性を知っていれば十分かと思います。
1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)及び同期角速度\( \ \omega _{\mathrm {s}} \ \)
三相誘導電動機の極数が\( \ p \ \),電源の周波数が\( \ f \ \mathrm {[Hz]} \ \)の時,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は,
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
\end{eqnarray}
\]
となります。また,同期角速度\( \ \omega _{\mathrm {s}} \ \mathrm {[rad / s]} \ \)は,
\[
\begin{eqnarray}
\omega _{\mathrm {s}} &=&\frac {2\pi N_{\mathrm {s}}}{60} \\[ 5pt ]
&=&\frac {2\pi }{60}\cdot \frac {120f}{p} \\[ 5pt ]
&=&\frac {4\pi f}{p} \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
2.誘導機の滑り\( \ s \ \)
誘導機の同期速度が\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \),回転速度が\( \ N \ \mathrm {[{min}^{-1}]} \ \)である時,誘導機の滑り\( \ s \ \)は,
\[
\begin{eqnarray}
s &=&\frac {N_{\mathrm {s}}-N}{N_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
となります。
3.二次入力\( \ P_{2} \ \)と出力\( \ P_{\mathrm {o}} \ \)と二次銅損\( \ P_{\mathrm {c2}} \ \)の関係
誘導電動機の\( \ \mathrm {L} \ \)形等価回路は図1のようになります。図1において,\( \ {\dot V}_{1} \ \mathrm {[V]} \ \)は一次側端子電圧,\( \ {\dot I}_{1} \ \mathrm {[A]} \ \)は一次電流,\( \ {\dot I}_{2}^{\prime } \ \mathrm {[A]} \ \)は二次電流の一次換算,\( \ {\dot I}_{0} \ \mathrm {[A]} \ \)は励磁電流,\( \ r_{1} \ \mathrm {[\Omega ]} \ \)は一次巻線抵抗,\( \ r_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次巻線抵抗の一次換算,\( \ x_{1} \ \mathrm {[\Omega ]} \ \)は一次漏れリアクタンス,\( \ x_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次漏れリアクタンスの一次換算,\( \ s \ \)は滑りとなります。
図1より,出力\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \),二次入力\( \ P_{2} \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P_{\mathrm {o}} &=& 3\frac {1-s}{s}r_{2}^{\prime }{I_{2}^{\prime }}^{2} \\[ 5pt ]
P_{\mathrm {c2}} &=& 3r_{2}^{\prime }{I_{2}^{\prime }}^{2} \\[ 5pt ]
P_{2} &=& P_{\mathrm {o}}+P_{\mathrm {c2}} =3\frac {r_{2}^{\prime }}{s}{I_{2}^{\prime }}^{2} \\[ 5pt ]
\end{eqnarray}
\]
となり,誘導電動機の二次入力\( \ P_{2} \ \mathrm {[W]} \ \),出力\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)には,
\[
\begin{eqnarray}
P_{2}:P_{\mathrm {o}}:P_{\mathrm {c2}} &=& 1:(1-s):s \\[ 5pt ]
\end{eqnarray}
\]
の関係があることが分かります。

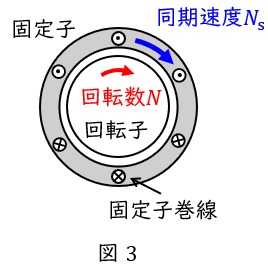
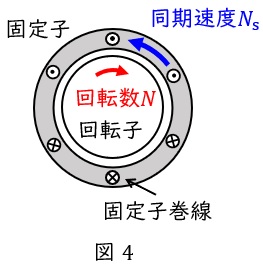
4.滑りの違いによる誘導機の動作の違い
①\( \ s<0 \ \)のとき
\( \ N>N_{\mathrm {s}} \ \)となるので,同期速度\( \ N_{\mathrm {s}} \ \)よりも回転速度\( \ N \ \)が高い状態で,どちらも同方向に回転している状態です。このとき,誘導機は誘導発電機として働き,回生制動となり電源側に電力が返還されます。

②\( \ 0<s<1 \ \)のとき
\( \ N<N_{\mathrm {s}} \ \)となるので,同期速度\( \ N_{\mathrm {s}} \ \)よりも回転速度\( \ N \ \)が低い状態で,どちらも同方向に回転している状態です。このとき,誘導機は誘導電動機として働き,電源から電力が供給されます。
③\( \ s>1 \ \)のとき
回転速度\( \ N \ \)に対し同期速度\( \ N_{\mathrm {s}} \ \)が逆向きに回転している状態で,このとき逆向きに大きなトルクがかかります。このとき,誘導機は誘導ブレーキとして働き,入力は熱として消費されます。回生制動より大きなトルクがかかるので,急ブレーキとして使用します。
【解答】
(1)解答:チ
題意より解答候補は,(チ)ソフトスタート装置,(ワ)継電器,(レ)進相コンデンサ,になると思います。
系統への併入時の突入電流を制限するのはソフトスタート装置といいます。
(2)解答:ヌ
題意より解答候補は,(ニ)高周波,(ヘ)矩形波,(ヌ)滑り周波数,になると思います。
二次励磁方式により,二次側をインバータなどにより適切な滑り周波数の交流で励磁すれば,更に広い範囲での可変速化が可能で,電圧や無効電力の調整も可能となります。
(3)解答:タ
題意より解答候補は,(リ)\( \ \displaystyle \frac {\left( 1-s\right) ^{2}}{s}P_{2} \ \),(ル)\( \ \displaystyle \frac {\left( 1-s\right) }{s}P_{2} \ \),(ヲ)\( \ \displaystyle \frac {P_{2}}{\omega } \ \),(タ)\( \ sP_{2} \ \),(ソ)\( \ \displaystyle \left( 1-s\right) P_{2} \ \),になると思います。
ワンポイント解説「3.二次入力\( \ P_{2} \ \)と出力\( \ P_{\mathrm {o}} \ \)と二次銅損\( \ P_{\mathrm {c2}} \ \)の関係」の通り,二次銅損は一般に\( \ sP_{2} \ \)で表され,二次励磁方式を用いる場合,\( \ sP_{2} \ \)として表される電力の大半がインバータから供給されます。
(4)解答:イ
題意より解答候補は,(イ)\( \ s<0 \ \),(ハ)\( \ s>1 \ \),(ホ)\( \ s>0 \ \),(ヨ)\( \ s=0 \ \),になると思います。
ワンポイント解説「4.滑りの違いよる電動機の動作の違い」の通り,回転子角速度\( \ \omega _{2} \ \)が電源角周波数\( \ \omega _{1} \ \)より大きい場合,インバータは滑りによる電力分を吸収することになり,滑りは\( \ s<0 \ \)となります。
(5)解答:ホ
題意より解答候補は,(イ)\( \ s<0 \ \),(ハ)\( \ s>1 \ \),(ホ)\( \ s>0 \ \),(ヨ)\( \ s=0 \ \),になると思います。
二次励磁方式では滑りが\( \ s>0 \ \)であっても,非同期運転により風車による機械的な動力とインバータの電力の和が電源に供給される。
(6)解答:ソ
題意より解答候補は,(リ)\( \ \displaystyle \frac {\left( 1-s\right) ^{2}}{s}P_{2} \ \),(ル)\( \ \displaystyle \frac {\left( 1-s\right) }{s}P_{2} \ \),(ヲ)\( \ \displaystyle \frac {P_{2}}{\omega } \ \),(タ)\( \ sP_{2} \ \),(ソ)\( \ \displaystyle \left( 1-s\right) P_{2} \ \),になると思います。
ワンポイント解説「3.二次入力\( \ P_{2} \ \)と出力\( \ P_{\mathrm {o}} \ \)と二次銅損\( \ P_{\mathrm {c2}} \ \)の関係」の通り,風車の機械的な動力は\( \ \displaystyle \left( 1-s\right) P_{2} \ \)で表されます。



















 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん