【問題】
【難易度】★★★★☆(やや難しい)
次の文章は,誘導電動機のベクトル制御に関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる最も適切なものを解答群の中から選べ。
\( \ \fbox { (1) } \ \)において,界磁磁束軸と電機子電流の磁束軸との間の角度は電気角で\( \ 90° \ \)であり,界磁磁束と電機子電流によりトルクを発生し,さらに,界磁電流を一定にすればトルクは電機子電流に比例する。この考え方に基づき,誘導電動機のトルクなどを制御する方式をベクトル制御と呼んでいる。
誘導電動機の\( \ \fbox { (2) } \ \)を,磁束を発生する励磁電流成分とトルクを発生するトルク電流成分とに分解し,それぞれの電流成分をベクトルとして独立に制御する。
ベクトル制御は直接型ベクトル制御と間接型ベクトル制御に大別される。このうち直接型ベクトル制御は,磁束を検出して制御する方式である。二次磁束指令値\( \ \mathit {\phi }_{2}^{*} \ \)とトルク電流指令値\( \ i_{\mathrm {q}}^{*} \ \)に応じて励磁電流ベクトルとトルク電流ベクトルを制御することにより電動機を\( \ \fbox { (1) } \ \)のように扱うことができる。
一方,間接型ベクトル制御は磁束を検出することなしに制御する方法であり,磁束センサを必要とせずにベクトル制御できる。
一つの方式として二次磁束指令値\( \ \mathit {\phi }_{2}^{*} \ \)から\( \ \fbox { (3) } \ \)指令値を求めて制御する方式がある。電動機の二次抵抗を\( \ r_{2} \ \),二次インダクタンスを\( \ L_{2} \ \),相互インダクタンスを\( \ M \ \)とした場合,\( \ \fbox { (3) } \ \)指令値を\( \ \omega _{\mathrm {s}}^{*} \ \)として,次のように表される。
\[
\begin{eqnarray}
\omega _{\mathrm {s}}^{*} &=& \frac {r_{2}}{L_{2}}M\frac {i_{\mathrm {q}}^{*}}{\mathit {\phi }_{2}^{*}} \\[ 5pt ]
\end{eqnarray}
\]
この式中の\( \ \displaystyle \frac {r_{2}}{L_{2}} \ \)の逆数である\( \ \displaystyle \frac {L_{2}}{r_{2}}=T_{2} \ \)は,電動機の二次回路の\( \ \fbox { (4) } \ \)と呼ばれる。この方式は\( \ r_{2} \ \),\( \ L_{2} \ \),\( \ M \ \)を制御演算に用いているが,それらのうち\( \ \fbox { (5) } \ \)の温度変化の影響が最も大きい。
〔問3の解答群〕
\[
\begin{eqnarray}
&(イ)& 共振周波数 &(ロ)& 一次電流 &(ハ)& 二次電流 \\[ 5pt ]
&(ニ)& V / f \ 一定制御 &(ホ)& 滑り角周波数 &(ヘ)& 他励直流機 \\[ 5pt ]
&(ト)& 時定数 &(チ)& 一次角周波数 &(リ)& 特性インピーダンス \\[ 5pt ]
&(ヌ)& 二次インダクタンス &(ル)& 二次抵抗 &(ヲ)& 空隙磁束 \\[ 5pt ]
&(ワ)& 同期機 &(カ)& 回転子角周波数 &(ヨ)& 相互インダクタンス \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
誘導電動機のベクトル制御に関する問題です。
おそらく\( \ 2 \ \)種までには出題されたことはない内容かと思います。
専門書では定量的にかなり詳しく記載してある内容ですが,電験で出題されることは考えにくく,以下の概要を理解しておけば十分に得点できるようになるかと思います。
1.誘導電動機のベクトル制御
誘導電動機のトルク制御法の一つで,誘導電動機の一次電流を磁束を発生する励磁電流成分(\( \ \mathrm {d} \ \)軸成分)とトルクを発生するトルク電流成分(\( \ \mathrm {q} \ \)軸成分)に分け,他励直流電動機のようにトルクを制御することができる方法です。
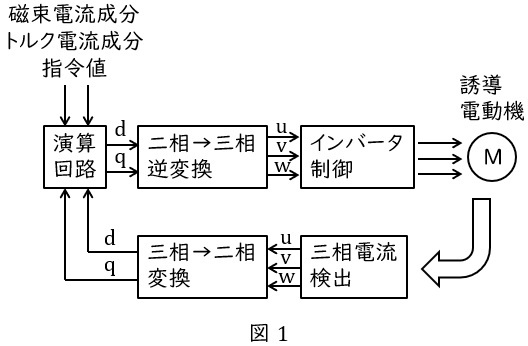
詳細はかなり複雑になるので割愛しますが,図1に示すように,三相の磁束の検出し,それを励磁電流とトルク電流成分に分解し,その信号を指令値と比較し再び三相に逆変換し,インバータ等をパワーエレクトロニクス技術を用いて誘導電動機のトルクを制御します。
磁束の検出方法としては,磁気センサで磁束を検出して制御する直接型ベクトル制御と二次磁束の指令値から演算により滑り周波数指令値を求めて制御する間接型ベクトル制御があります。
間接型ベクトル制御は磁気センサが不要というメリットがあり,例えば電動機の二次磁束指令値\( \ \mathit {\phi }_{2}^{*} \ \)とトルク電流指令値\( \ i_{\mathrm {q}}^{*} \ \),二次抵抗を\( \ r_{2} \ \),二次インダクタンスを\( \ L_{2} \ \),相互インダクタンスを\( \ M \ \)としたときの,滑り角周波数の指令値
\[
\begin{eqnarray}
\omega _{\mathrm {s}}^{*} &=& \frac {r_{2}}{L_{2}}M\frac {i_{\mathrm {q}}^{*}}{\mathit {\phi }_{2}^{*}} \\[ 5pt ]
\end{eqnarray}
\]
と電動機回転角速度(角周波数)の和により一次角周波数を求め,さらにこれを積分して一次電流の位相角を求め,トルク電流を制御します。
直接型ベクトル制御は,直接磁束を検出するため制御が安定しますが,磁気センサを電動機内部に取り付ける必要があるため実用化が難しい側面があります。一方,間接型ベクトル制御は,上式の二次抵抗\( \ r_{2} \ \)が温度で変化し,インダクタンス\( \ L_{2} \ \)が電流値で変化するため,正確な指令値を算出しにくいという問題点があります。
【解答】
(1)解答:ヘ
題意より解答候補は,(ヘ)他励直流機,(ワ)同期機,になると思います。
ワンポイント解説「1.誘導電動機のベクトル制御」の通り,励磁電流ベクトルとトルク電流ベクトルに分けて考える制御は他励直流機のように扱う制御となります。
(2)解答:ロ
題意より解答候補は,(ロ)一次電流,(ハ)二次電流,等になると思います。
ワンポイント解説「1.誘導電動機のベクトル制御」の通り,ベクトル制御は誘導電動機の一次電流を磁束を発生する励磁電流成分とトルクを発生するトルク電流成分とに分解し,それぞれの電流成分をベクトルとして独立に制御する方法となります。
(3)解答:ホ
題意より解答候補は,(イ)共振周波数,(ホ)滑り角周波数,(チ)一次角周波数,(カ)回転子角周波数,等になると思います。
ワンポイント解説「1.誘導電動機のベクトル制御」の通り,間接型ベクトル制御の方式として,二次磁束指令値\( \ \mathit {\phi }_{2}^{*} \ \)から滑り角周波数指令値\( \ \omega _{\mathrm {s}}^{*} \ \)を求めて制御する方式があります。
(4)解答:ト
題意より解答候補は,(ト)時定数,(リ)特性インピーダンス,(ヲ)空隙磁束,等になると思います。
\( \ \displaystyle \frac {r_{2}}{L_{2}} \ \)の逆数\( \ \displaystyle \frac {L_{2}}{r_{2}}=T_{2} \ \)は,電動機の二次回路の時定数と呼ばれます。
(5)解答:ル
題意より解答候補は,(ヌ)二次インダクタンス,(ル)二次抵抗,(ヨ)相互インダクタンス,になると思います。
ワンポイント解説「1.誘導電動機のベクトル制御」の通り,最も温度変化の影響が大きいのは二次抵抗となります。



















 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん