Contents
【問題】
【難易度】★★★★☆(やや難しい)
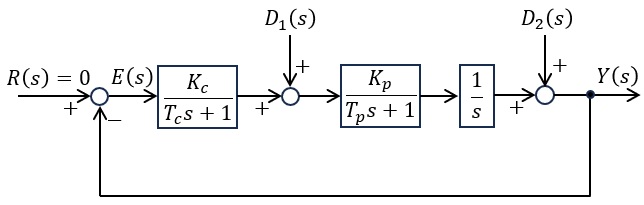
次の文章は,図のフィードバック制御系に関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる式又は数値を解答群の中から選び,その記号をマークシートに記入しなさい。
外乱\( \ D_{2}(s) = 0 \ \)の場合,外乱\( \ D_{1}(s) \ \)から偏差\( \ E(s) \ \)までの伝達関数は,
\[
\begin{eqnarray}
\frac {E(s)}{D_{1}(s)}&=&-\frac { \ \fbox { (1) } \ }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} } \\[ 5pt ]
\end{eqnarray}
\]
となり,外乱\( \ D_{1}(s) \ \)が単位ステップ関数のときの定常位置偏差は,\( \ \fbox { (2) } \ \)となる。
一方,外乱\( \ D_{1}(s) = 0 \ \)の場合,外乱\( \ D_{2}(s) \ \)から偏差\( \ E(s) \ \)までの伝達関数は,
\[
\begin{eqnarray}
\frac {E(s)}{D_{2}(s)}&=&-\frac { \ \fbox { (3) } \ }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} } \\[ 5pt ]
\end{eqnarray}
\]
となり,外乱\( \ D_{2}(s) \ \)が単位ステップ関数のときの定常位置偏差は,\( \ \fbox { (4) } \ \)となる。このように外乱の付加する場所により定常位置偏差の値が異なる。
また,図のフィードバック制御系が安定となる条件は,
\[
\begin{eqnarray}
0< K_{c}< \ \fbox { (5) } \ \\[ 5pt ]
\end{eqnarray}
\]
である。ただし,\( \ T_{c} >0 \ \),\( \ T_{p} >0 \ \)とする。
〔問4の解答群〕
\[
\begin{eqnarray}
&(イ)& \infty &(ロ)& \frac {T_{c}T_{p}K_{p}}{T_{c}+T_{p}} &(ハ)& s\left( T_{c}s+1\right) \left( T_{p}s+1\right) \\[ 5pt ]
&(ニ)& -\frac {1}{K_{p}} &(ホ)& K_{p}\left( T_{c}s+1\right) &(ヘ)& -\frac {1}{K_{c}} \\[ 5pt ]
&(ト)& K_{c}\left( T_{c}s+1\right) &(チ)& -\frac {1}{1+K_{c}K_{p}} &(リ)& -\frac {1}{K_{p}K_{c}} \\[ 5pt ]
&(ヌ)& \left( T_{c}s+1\right) \left( T_{p}s+1\right) &(ル)& \frac {T_{c}+T_{p}}{T_{c}T_{p}K_{p}} &(ヲ)& \frac {K_{p}\left( T_{c}+T_{p}\right) }{T_{c}T_{p}} \\[ 5pt ]
&(ワ)& 0 &(カ)& s\left( T_{p}s+1\right) &(ヨ)& K_{p}\left( T_{p}s+1\right) \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
フィードバック制御系の伝達関数と定常位置偏差,安定度に関する問題です。
このまま二次試験に出題されても良さそうな高い計算力を必要とする問題で,一次試験としては時間がかなり厳しい問題であったかと思います。
一次試験の時間配分は大問\( \ 1 \ \)問あたり平均\( \ 15 \ \)分以下で迷っている暇はありません。他の知識問題の時間配分を考えても長くても\( \ 30 \ \)分以内に解けるように計算力を上げていって下さい。
1.基本的なラプラス変換
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると以下のような関係があります。
\[
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
{\displaystyle \delta (t) }\atop{単位インパルス関数} & 1 \\[ 5pt ]
{\displaystyle u (t) }\atop{単位ステップ関数} & \displaystyle \frac {1}{s} \\[ 5pt ]
K & \displaystyle \frac {K}{s} \\[ 5pt ]
t & \displaystyle \frac {1}{s^{2}} \\[ 5pt ]
\mathrm {e}^{at} & \displaystyle \frac {1}{s-a} \\[ 5pt ]
\sin \omega t & \displaystyle \frac {\omega }{s^{2}+\omega ^{2}} \\[ 5pt ]
\cos \omega t & \displaystyle \frac {s}{s^{2}+\omega ^{2}} \\[ 5pt ]
\displaystyle \frac {\mathrm {d}f\left( t \right) }{\mathrm {d}t} & sF\left( s \right) -f\left( 0 \right) \\[ 5pt ]
\displaystyle \int f\left( t \right) \mathrm {d}t & \displaystyle \frac {F\left( s \right) }{s}+\frac {1}{s}\int _{-\infty }^{0}f\left( \tau \right) \mathrm {d}\tau \\[ 5pt ]
\hline
\end{array}
\]
2.ブロック線図の考え方
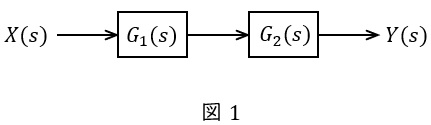
①直列
図1のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
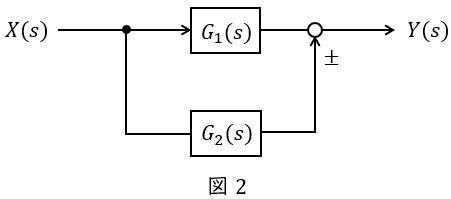
②並列
図2のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)±G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
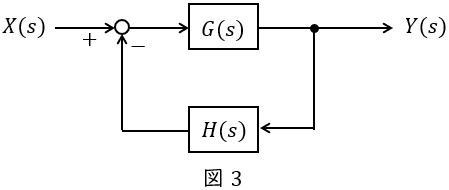
③フィードバック
図3のような\( \ G(s) \ \),\( \ H(s) \ \)が与えられているとき,全体の伝達関数\( \ W(s) \ \)は,
\[
\begin{eqnarray}
Y(s)&=&\left\{ X(s) -H(s)Y(s) \right\} G(s) \\[ 5pt ]
Y(s)&=&G(s)X(s) -G(s)H(s)Y(s) \\[ 5pt ]
Y(s)+G(s)H(s)Y(s) &=&G(s)X(s) \\[ 5pt ]
\left\{ 1+G(s)H(s)\right\} Y(s) &=&G(s)X(s) \\[ 5pt ]
\frac {Y(s)}{X(s)}&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
W(s)&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
\end{eqnarray}
\]
となります。
3.ラウスの安定判別法
特性方程式\( \ a_{0}s^{n}+a_{1}s^{n-1}+a_{2}s^{n-2}+\cdots +a_{n-1}s+a_{n}=0 \ \)が与えられているとき,ラウスの数表は下表にように描くことができ,\( \ 1 \ \)列の値がすべて同符号であるとき,制御系は安定であると判別できます。
\[
\begin{array}{c|ccc}
& \color {red} {1 \ 列} & 2 \ 列 & 3 \ 列 \\
\hline
1 \ 行 & \color {red} {a_{0}} & a_{2} & a_{4} & \cdots \\
2 \ 行 & \color {red} {a_{1}} & a_{3} & a_{5} & \cdots \\
3 \ 行 & \color {red} {b_{1}=\frac {a_{1}a_{2}-a_{0}a_{3}}{a_{1}}} & b_{2}=\frac {a_{1}a_{4}-a_{0}a_{5}}{a_{1}} & \cdots \\
4 \ 行 & \color {red} {c_{1}=\frac {b_{1}a_{3}-a_{1}b_{2}}{b_{1}}} & c_{2}=\frac {b_{1}a_{5}-a_{1}b_{3}}{b_{1}} & \cdots \\
\vdots & \color {red} {\vdots } & \vdots &
\end{array}
\]
4.最終値の定理
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると,\( \ f(t) \ \)の定常値は,
\[
\begin{eqnarray}
\displaystyle \lim _{ t \to \infty } f(t)&=&\displaystyle \lim _{ s \to 0 } sF(s) \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
【解答】
(1)解答:ホ
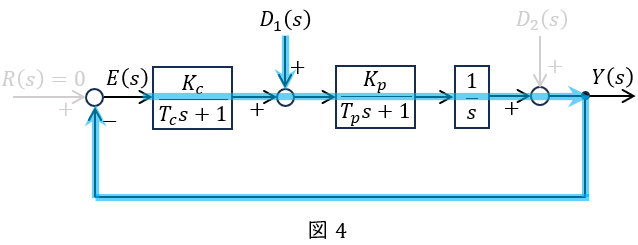
\( \ D_{2}(s) = 0 \ \)のときのブロック線図は図4の通りとなり,図4に示す順序で関係式を立てると,
\[
\begin{eqnarray}
\left\{ E(s) \cdot \frac {K_{c}}{T_{c}s+1}+D_{1}(s)\right\} \cdot \frac {K_{p}}{T_{p}s+1}\cdot \frac {1}{s}\cdot \left( -1\right) &=&E(s) \\[ 5pt ]
-K_{p}\left\{ \frac {K_{c}}{T_{c}s+1}E(s) +D_{1}(s)\right\} &=&\left( T_{p}s+1\right) s E(s) \\[ 5pt ]
-\frac {K_{c}K_{p}}{T_{c}s+1}E(s) -K_{p}D_{1}(s) &=&\left( T_{p}s+1\right) sE(s) \\[ 5pt ]
-\frac {K_{c}K_{p}}{T_{c}s+1}E(s) -\left( T_{p}s+1\right) sE(s)&=&K_{p}D_{1}(s) \\[ 5pt ]
-K_{c}K_{p}E(s) -\left( T_{c}s+1\right) \left( T_{p}s+1\right) sE(s)&=&K_{p}\left( T_{c}s+1\right) D_{1}(s) \\[ 5pt ]
-K_{c}K_{p}E(s)-\left\{ T_{c}T_{p}s^{3}+\left( T_{c}+T_{p}\right) s^{2}+s\right\} E(s)&=&K_{p}\left( T_{c}s+1\right) D_{1}(s) \\[ 5pt ]
-\left\{ T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} \right\} E(s)&=&K_{p}\left( T_{c}s+1\right) D_{1}(s) \\[ 5pt ]
\frac {E(s)}{D_{1}(s)}&=&-\frac {K_{p}\left( T_{c}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} } \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)解答:ヘ
ワンポイント解説「1.基本的なラプラス変換」の通り,外乱\( \ D_{1}(s) \ \)が単位ステップ関数のとき,\( \ \displaystyle D_{1}(s) =\frac {1}{s} \ \)を代入すれば良いから,
\[
\begin{eqnarray}
E(s)&=&-\frac {K_{p}\left( T_{c}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }D_{1}(s) \\[ 5pt ]
&=&-\frac {K_{p}\left( T_{c}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }\cdot \frac {1}{s} \\[ 5pt ]
\end{eqnarray}
\]
となる。よって,最終値の定理より,定常位置偏差は,
\[
\begin{eqnarray}
\displaystyle \lim _{ s \to 0 } sE(s)&=&\displaystyle \lim _{ s \to 0 } s\left\{ -\frac {K_{p}\left( T_{c}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }\cdot \frac {1}{s} \right\} \\[ 5pt ]
&=&\displaystyle \lim _{ s \to 0 } \left\{ -\frac {K_{p}\left( T_{c}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }\right\} \\[ 5pt ]
&=&-\frac {K_{p}\left( 0+1\right) }{0+0+0+K_{c}K_{p} } \\[ 5pt ]
&=&-\frac {1}{K_{c}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(3)解答:ハ
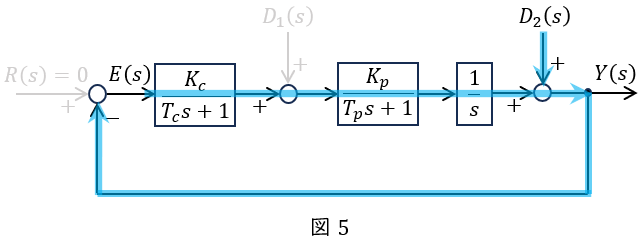
(1)と同様に,\( \ D_{1}(s) = 0 \ \)のときのブロック線図は図5の通りとなり,図5に示す順序で関係式を立てると,
\[
\begin{eqnarray}
\left\{ E(s) \cdot \frac {K_{c}}{T_{c}s+1}\cdot \frac {K_{p}}{T_{p}s+1}\cdot \frac {1}{s}+D_{2}(s)\right\} \cdot \left( -1\right) &=&E(s) \\[ 5pt ]
-\frac {K_{c}K_{p}}{\left( T_{c}s+1\right) \left( T_{p}s+1\right) s}E(s) -D_{2}(s) &=&E(s) \\[ 5pt ]
-K_{c}K_{p}E(s) -\left( T_{c}s+1\right) \left( T_{p}s+1\right) sD_{2}(s) &=&\left( T_{c}s+1\right) \left( T_{p}s+1\right) sE(s) \\[ 5pt ]
-\left( T_{c}s+1\right) \left( T_{p}s+1\right) sE(s) -K_{c}K_{p}E(s) &=&\left( T_{c}s+1\right) \left( T_{p}s+1\right) sD_{2}(s) \\[ 5pt ]
-\left\{ T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} \right\} E(s) &=&\left( T_{c}s+1\right) \left( T_{p}s+1\right) sD_{2}(s) \\[ 5pt ]
\frac {E(s)}{D_{2}(s)}&=&-\frac {s\left( T_{c}s+1\right) \left( T_{p}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} } \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(4)解答:ワ
ワンポイント解説「1.基本的なラプラス変換」の通り,外乱\( \ D_{2}(s) \ \)が単位ステップ関数のとき,\( \ \displaystyle D_{2}(s) =\frac {1}{s} \ \)を代入すれば良いから,
\[
\begin{eqnarray}
E(s)&=&-\frac {s\left( T_{c}s+1\right) \left( T_{p}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }D_{2}(s) \\[ 5pt ]
&=&-\frac {s\left( T_{c}s+1\right) \left( T_{p}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }\cdot \frac {1}{s} \\[ 5pt ]
\end{eqnarray}
\]
となる。よって,最終値の定理より,定常位置偏差は,
\[
\begin{eqnarray}
\displaystyle \lim _{ s \to 0 } sE(s)&=&\displaystyle \lim _{ s \to 0 } s\left\{ -\frac {s\left( T_{c}s+1\right) \left( T_{p}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }\cdot \frac {1}{s}\right\} \\[ 5pt ]
&=&\displaystyle \lim _{ s \to 0 } \left\{ -\frac {s\left( T_{c}s+1\right) \left( T_{p}s+1\right) }{T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p} }\right\} \\[ 5pt ]
&=& -\frac {0\times \left( 0+1\right) \times \left( 0+1\right) }{0+0+0+K_{c}K_{p} } \\[ 5pt ]
&=&0\\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(5)解答:ル
(1)及び(3)解答式より,特性方程式は,
\[
\begin{eqnarray}
T_{c}T_{p}s^{3}+ \left( T_{c}+T_{p}\right) s^{2}+s+K_{c}K_{p}&=&0 \\[ 5pt ]
\end{eqnarray}
\]
となり,ラウス表を作成すると,ワンポイント解説「3.ラウスの安定判別法」の通り,
\[
\begin{array}{c|cc}
& 1列 & 2列 \\
\hline
1行 & T_{c}T_{p} & 1 \\
2行 & T_{c}+T_{p} & K_{c}K_{p} \\
3行 & \frac {T_{c}+T_{p}-T_{c}T_{p}K_{c}K_{p}}{T_{c}+T_{p}} & \\
4行 & K_{c}K_{p} & \\
\end{array}
\]
となるので,安定である条件は,
\[
\begin{eqnarray}
T_{c}T_{p}&>&0 \\[ 5pt ]
T_{c}+T_{p} &>&0 \\[ 5pt ]
\frac {T_{c}+T_{p}-T_{c}T_{p}K_{c}K_{p}}{T_{c}+T_{p}} &>&0 \\[ 5pt ]
K_{c}K_{p} &>&0 \\[ 5pt ]
\end{eqnarray}
\]
となり,第三式より,
\[
\begin{eqnarray}
\frac {T_{c}+T_{p}-T_{c}T_{p}K_{c}K_{p}}{T_{c}+T_{p}} &>&0 \\[ 5pt ]
T_{c}+T_{p}-T_{c}T_{p}K_{c}K_{p} &>&0 \\[ 5pt ]
T_{c}T_{p}K_{c}K_{p} &<&T_{c}+T_{p} \\[ 5pt ]
K_{c} &<&\frac {T_{c}+T_{p}}{T_{c}T_{p}K_{p}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。











 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】








 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは