【問題】
【難易度】★★★★☆(やや難しい)
次の文章は,ステッピングモータとその応用装置である\( \ \mathrm {XY} \ \)テーブルに関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる最も適切なものを解答群の中から選べ。
ステッピングモータは,入力された\( \ \fbox { (1) } \ \)に比例した角度だけ回転するモータで,オープンループ制御が可能であり,システム構成を簡素化できる利点がある。その他の利点として,回転角の精度が高いことや,起動,停止,正逆転,変速が容易で応答性が良いことが挙げられる。また,停止時に\( \ \fbox { (2) } \ \)があり,ブレーキ機構なしに位置を保てるものがある。このような利点がある一方,動作時の脱調や停止時に振動が減衰するまでの\( \ \fbox { (3) } \ \)に留意する必要がある。
ステッピングモータの構造には\( \ \fbox { (4) } \ \),永久磁石形があるが,現在はその両方の特徴を持つハイブリッド形が多く用いられる。
角度分解能を上げるには,モータの相数やロータの歯数を増やす方法があるが,物理面や経済性での限界があるため,励磁制御によるハーフステップ駆動やさらに精度を上げた\( \ \fbox { (5) } \ \)ステップ駆動なども行われる。
ステッピングモータの回転運動を\( \ \fbox { (6) } \ \)などにより直線運動に変換し,\( \ \mathrm {XY2} \ \)軸が直交するように組み合わせた自動化装置に\( \ \mathrm {XY} \ \)テーブルがある。
ある\( \ \mathrm {XY} \ \)テーブルにおいて,各軸のテーブル分解能\( \ 0.01 \ \mathrm {mm} \ \),モータの回転速度を\( \ 400 \ \mathrm {min^{-1}} \ \),モータのステップ角度を\( \ 0.72° \ \)としたときに,\( \ \mathrm {XY2} \ \)軸を同時に駆動させたときに合成されるステージの移動速度は,\( \ \fbox { (7) } \ \mathrm {mm / min} \ \)である。なお,他に減速機構等は無く,このステップ角度とテーブル分解能は完全に対応するものとして導出せよ。
〔問6の解答群〕
\[
\begin{eqnarray}
&(イ)& 2 \ 000 &(ロ)& 2 \ 830 &(ハ)& パルス数 \\[ 5pt ]
&(ニ)& 電圧値 &(ホ)& フル &(ヘ)& インクリメンタル形 \\[ 5pt ]
&(ト)& 1 \ 410 &(チ)& マイクロ &(リ)& リンク機構 \\[ 5pt ]
&(ヌ)& ボールねじ &(ル)& ファースト &(ヲ)& セットリングタイム \\[ 5pt ]
&(ワ)& 冷却時間 &(カ)& 可変磁極形 &(ヨ)& 可変リラクタンス形 \\[ 5pt ]
&(タ)& 起動トルク &(レ)& 保持トルク &(ソ)& ローラベアリング \\[ 5pt ]
&(ツ)& スルーレート &(ネ)& 電流値 && \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
ステッピングモータに関する問題です。
近年は\( \ 1 \ \)種から\( \ 3 \ \)種までステッピングモータに関する出題が比較的多く,トレンドとなっている印象があります。
電験の参考書にはあまり記載のない分野かもしれませんが,個別に参考書を購入して学習しても良いかもしれません。
1.ステッピングモータ
ステッピングモータは時計の針のようにパルス信号が送られる毎に定められたステップ角度(\( \ 0.72° \ \)や\( \ 1.8° \ \))を回転するモータです。
回転子の構造の違いで以下の\( \ 3 \ \)種類があります。
①可変リラクタンス形(\( \ \mathrm {VR} \ \)形)
回転子に歯車形の軟磁性体を用いたモータです。最も古くから利用されているステッピングモータで,固定子巻線で励磁され,それに回転子の歯が引き寄せられることによって回転します。
②パーマネントマグネット形(\( \ \mathrm {PM} \ \)形)
回転子に永久磁石を用いたモータです。回転子は歯車の代わりに永久磁石のN極とS極を交互に並べられたような構造をしています。回転子が磁化されていることによって磁束強度が増大されるため、トルク特性が向上します。
③ハイブリッド形(\( \ \mathrm {HB} \ \)形)
回転子の中央に円筒形の永久磁石を配置し,その両端を歯車状の鉄心で挟み込んだ構造をしています。パーマネントマグネット形よりも,ステップ分解能及びトルク性能に優れた特性を持ちます。
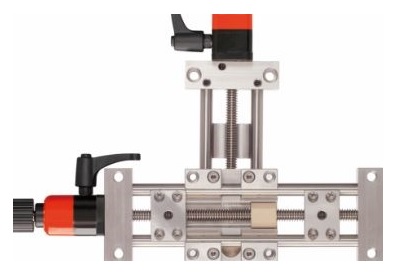
2.\( \ \mathrm {XY} \ \)テーブル
下図に示すような,ボールねじ(図の縦横中央にあるねじ部のことをいいます。)の作用により回転運動の力を利用して\( \ \mathrm {XY} \ \)方向に移動するためのテーブルです。
医療機器や精密機器,半導体装置のロボットの制御等に利用されることが多い機器です。
出典:igus HP
https://www.igus.co.jp/info/xy-tables
【解答】
(1)解答:ハ
題意より,解答候補は(ハ)パルス数,(ニ)電圧値,(ヲ)セットリングタイム,(ツ)スルーレート,(ネ)電流値,等になると思います。
ワンポイント解説「1.ステッピングモータ」の通り,ステッピングモータは入力されたパルス数に比例した角度だけステップ上に回転するモータとなります。
(2)解答:レ
題意より,解答候補は(ヲ)セットリングタイム,(ワ)冷却時間,(タ)起動トルク,(レ)保持トルク,等になると思います。
通電状態やパーマネントマグネット形のステッピングモータでは停止時に保持トルクがあるため,ブレーキ機構なしに位置を保てるものがあります。
(3)解答:ヲ
題意より,解答候補は(ニ)電圧値,(ヲ)セットリングタイム,(ワ)冷却時間,(ツ)スルーレート,(ネ)電流値,等になると思います。
ステッピングモータはパルス信号が入ることにより,次のステップに移動しますがその際,目標の場所にピタッと止まることができず,一旦通り越して何度か減衰振動した後目標の場所に停止します。この時間をセットリングタイムといいます。
(4)解答:ヨ
題意より,解答候補は(ヘ)インクリメンタル形,(カ)可変磁極形,(ヨ)可変リラクタンス形,になると思います。
ワンポイント解説「1.ステッピングモータ」の通り,ステッピングモータの構造としてあるのは可変リラクタンス形となります。
(5)解答:チ
題意より,解答候補は(ホ)フル,(チ)マイクロ,(ル)ファースト,になると思います。
ステッピングモータの角度分解能を上げるための方法としてマイクロステップ駆動と呼ばれる方法があります。
(6)解答:ヌ
題意より,解答候補は(リ)リンク機構,(ヌ)ボールねじ,(ソ)ローラベアリング,になると思います。
ワンポイント解説「2.\( \ \mathrm {XY} \ \)テーブル」の通り,\( \ \mathrm {XY} \ \)テーブルに利用される回転運動を直線運動に変換するのはボールねじとなります。
(7)解答:ロ
モータがステップ角度\( \ 0.72° \ \)動く毎に各軸のテーブルが分解能\( \ 0.01 \ \mathrm {mm} \ \)動くことになるので,モーターが\( \ 1 \ \)回転する際には,
\[
\begin{eqnarray}
\frac {360}{0.72}\times 0.01 &=&5 \ \mathrm {[mm]} \\[ 5pt ]
\end{eqnarray}
\]
ずつ動くことになる。モータの回転速度が\( \ 400 \ \mathrm {min^{-1}} \ \)なので,\( \ 1 \ \)分あたり,
\[
\begin{eqnarray}
5\times 400 &=&2 \ 000 \ \mathrm {[mm / min^{-1}]} \\[ 5pt ]
\end{eqnarray}
\]
ずつ動き,\( \ \mathrm {XY} \ \)同時に駆動させたときの移動は斜め\( \ 45° \ \)方向に移動することになるので,
\[
\begin{eqnarray}
2000 \times \sqrt {2} &≒&2 \ 830 \ \mathrm {[mm / min^{-1}]} \\[ 5pt ]
\end{eqnarray}
\]
動くことになる。





















 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん