【問題】
【難易度】★★☆☆☆(やや易しい)
三相星形結線の円筒形同期発電機(短絡比\(0.5\) )における出力と界磁電流との関係に関して,次の問に答えよ。ただし,鉄心の磁気飽和及び電機子抵抗は無視する。また,単位法は自己定格容量(定格皮相電力\(\mathrm {[kV\cdot A]}\))を基準としている。なお,界磁電流\(I_{\mathrm {f}}\)の大きさは,無負荷状態で定格電圧発生時の界磁電流\(I_{\mathrm {f0}}\)に対する比\(k_{\mathrm {1F}}\)( \(\displaystyle k_{\mathrm {1F}}=\frac {I_{\mathrm {f}}}{I_{\mathrm {f0}}}\) )で表示する。
(1) 定格周波数における,単位法表示の同期リアクタンス\(X_{\mathrm {S}} \ \mathrm {[ p.u. ]}\)の数値を算出せよ。
(2) 端子電圧(相電圧)\(V \ \mathrm {[ p.u. ]}\),無負荷誘導起電力\(E \ \mathrm {[ p.u. ]}\),負荷角(内部相差角)\(\delta \ \mathrm {[ p.u. ]}\)及び\(X_{\mathrm {S}} \ \mathrm {[ p.u. ]}\)を含む有効電力\(P \ \mathrm {[ p.u. ]}\)の式を導出せよ。また,\(V\)及び周波数が一定で運転し,\(P\)が一定の状態において\(I_{\mathrm {f}}\)を変化させても\(E\sin \delta \)が一定であることを示せ。
(3) \(V \ \mathrm {[ p.u. ]}\),\(E \ \mathrm {[ p.u. ]}\),\(\delta \ \mathrm {[ p.u. ]}\)及び\(X_{\mathrm {S}} \ \mathrm {[ p.u. ]}\)を含む無効電力\(Q \ \mathrm {[ p.u. ]}\)の式(誘導性無効電力を出力する遅れ力率のとき,\( Q > 0 \)とする)を導出せよ。また,\(V\)及び周波数が一定で運転し,\(Q\)が一定の状態において\(I_{\mathrm {f}}\)を変化させても\(E\cos \delta \)が一定であることを示せ。
(4) 定格周波数において,\( \ V =1 \ \mathrm { p.u. } \ \)及び\( \ P =0.5 \ \mathrm { p.u. } \ \)一定の状態で\(I_{\mathrm {f}}\)の大きさを\( k_{\mathrm {1F}}=2\)にしたときの\(Q \ \mathrm {[ p.u. ]}\),\(E \ \mathrm {[ p.u. ]}\),出力電流(相電流)\(I \ \mathrm {[ p.u. ]}\)及び力率\(\cos \phi \)の数値を算出せよ。ただし,\(\displaystyle 0 ≦ \delta ≦ \frac {\pi}{2} \mathrm {rad}\)とする。
【ワンポイント解説】
一種としては比較的易しい問題に分類されると思います。等価回路とベクトル図を描いて落ち着いて解くようにしましょう。
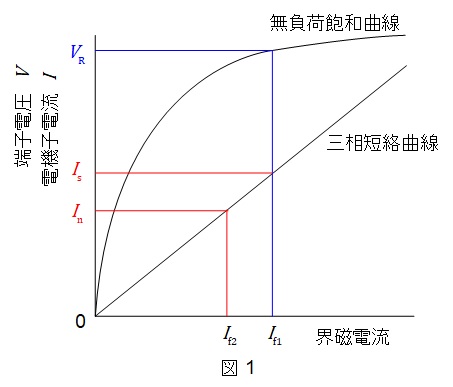
1.同期電動機の特性曲線
同期電動機の特性曲線は図1のように描けられ,短絡比\(K_{\mathrm {s}}\)は次のように定義されます。
\[
\begin{eqnarray}
K_{\mathrm {s}} &=& \frac {I_{\mathrm {f1}}}{I_{\mathrm {f2}}} \\[ 5pt ]
&=& \frac {I_{\mathrm {s}}}{I_{\mathrm {n}}} \\[ 5pt ]
\end{eqnarray}
\]
短絡比\(K_{\mathrm {s}}\)と単位法で表した同期インピーダンス\(Z_{\mathrm {s}}\)との関係は,
\[
\begin{eqnarray}
K_{\mathrm {s}} &=& \frac {I_{\mathrm {s}}}{I_{\mathrm {n}}} \\[ 5pt ]
&=& \frac {\frac {V_{\mathrm {n}}}{\sqrt {3}Z_{\mathrm {s}}}}{I_{\mathrm {n}}} \\[ 5pt ]
&=& \frac {V_{\mathrm {n}}}{\sqrt {3}Z_{\mathrm {s}}I_{\mathrm {n}}}\\[ 5pt ]
&=& \frac {1}{Z_{\mathrm {s}}\mathrm {[p.u.]}} \\[ 5pt ]
\end{eqnarray}
\]
となります。
【解答】
(1)単位法表示の同期リアクタンス\(X_{\mathrm {S}} \ \mathrm {[ p.u. ]}\)
電機子抵抗を無視できるので,ワンポイント解説「1.同期電動機の特性曲線」より,
\[
\begin{eqnarray}
X_{\mathrm {s}}\mathrm {[p.u.]} &=& \frac {1}{K_{\mathrm {s}}} \\[ 5pt ]
&=& \frac {1}{0.5} \\[ 5pt ]
&=& 2 \ \mathrm {[p.u.]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)有効電力\(P \ \mathrm {[ p.u. ]}\)の式を導出,\(E\sin \delta \)が一定であることを示す
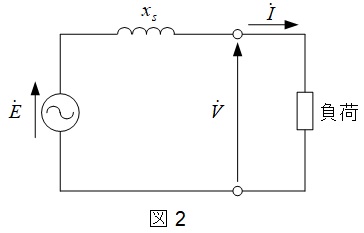
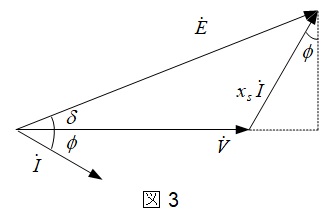
力率を\(\cos \phi \)として,題意に沿って等価回路とベクトル図を描くと図2及び図3の通りとなる。
図3のベクトル図より,
\[
\begin{eqnarray}
E\sin \delta &=& X_{\mathrm {s}}I\cos \phi \\[ 5pt ]
I\cos \phi &=& \frac {E\sin \delta }{X_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
となり,\(P=VI\cos \phi\)であるので,
\[
\begin{eqnarray}
P &=& VI\cos \phi \\[ 5pt ]
&=& \frac {EV\sin \delta }{X_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。これより,
\[
\begin{eqnarray}
E\sin \delta &=& \frac {PX_{\mathrm {s}}}{V} \\[ 5pt ]
\end{eqnarray}
\]
となり,周波数が一定であれば\(X_{\mathrm {s}}\)も一定であり,\(P\)及び\(V\)も一定なので,\(E\sin \delta \)も一定となる。
(3)無効電力\(Q \ \mathrm {[ p.u. ]}\)の式を導出,\(E\cos \delta \)が一定であることを示す
図3のベクトル図より,
\[
\begin{eqnarray}
E\cos \delta &=& V+X_{\mathrm {s}}I\sin \phi \\[ 5pt ]
I\sin \phi &=& \frac {E\cos \delta -V}{X_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
となり,\(Q=VI\sin \phi\)であるので,
\[
\begin{eqnarray}
Q &=& VI\sin \phi \\[ 5pt ]
&=& V\cdot \frac {E\cos \delta -V}{X_{\mathrm {s}}} \\[ 5pt ]
&=& \frac {EV\cos \delta -V^{2}}{X_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。これより,
\[
\begin{eqnarray}
EV\cos \delta -V^{2} &=& QX_{\mathrm {s}} \\[ 5pt ]
E\cos \delta &=& \frac {QX_{\mathrm {s}}}{V}+V \\[ 5pt ]
\end{eqnarray}
\]
となり,周波数が一定であれば\(X_{\mathrm {s}}\)も一定であり,\(Q\)及び\(V\)も一定なので,\(E\cos \delta \)も一定となる。
(4)\(Q \ \mathrm {[ p.u. ]}\),\(E \ \mathrm {[ p.u. ]}\),出力電流(相電流)\(I \ \mathrm {[ p.u. ]}\)及び力率\(\cos \phi \)の数値を算出
\(E ∝ I_{\mathrm {f}}\)であるから,\(E=2.0 \ \mathrm {[ p.u. ]}\)となる。
(2)より,
\[
\begin{eqnarray}
P &=& \frac {EV\sin \delta }{X_{\mathrm {s}}} \\[ 5pt ]
0.5 &=& \frac {2\times 1 \times \sin \delta }{2} \\[ 5pt ]
\sin \delta &=& \frac {1}{2}
\end{eqnarray}
\]
となるから,\(\displaystyle \cos \delta =\frac {\sqrt {3}}{2} \)となるので,
\[
\begin{eqnarray}
Q &=& \frac {EV\cos \delta -V^{2}}{X_{\mathrm {s}}} \\[ 5pt ]
&=& \frac {2\times 1 \times \frac {\sqrt {3}}{2} -1}{2} \\[ 5pt ]
&≒& 0.36603 → 0.366 \ \mathrm {[ p.u. ]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。\(P\)及び\(Q\)より,
\[
\begin{eqnarray}
\cos \phi &=& \frac {P}{\sqrt {P^{2}+Q^{2}}} \\[ 5pt ]
&=& \frac {0.5}{\sqrt {0.5^{2}+0.36603^{2}}} \\[ 5pt ]
&≒& 0.80689 → 0.807 \ \mathrm {[ p.u. ]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。\(P=VI\cos \phi \)であるから,
\[
\begin{eqnarray}
I &=& \frac {P}{V\cos \phi } \\[ 5pt ]
&=& \frac {0.5}{1\times 0.80689 } \\[ 5pt ]
&≒& 0.61966 → 0.620 \ \mathrm {[ p.u. ]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。














 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん