【問題】
【難易度】★★☆☆☆(やや易しい)
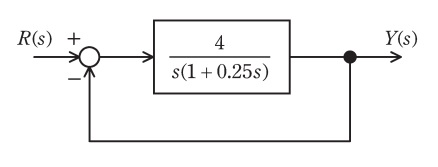
図のようなフィードバック制御系がある。ここで\( \ R(s) \ \)と\( \ Y(s) \ \)は,それぞれ目標値\( \ r(t) \ \)と制御量\( \ y(t) \ \)のラプラス変換である。次の問に答えよ。
(1) \( \ 2 \ \)次遅れ系の標準形\( \ \displaystyle G(s)=\frac {\omega _{\mathrm {n}}^{2}}{s^{2}+2\zeta \omega _{\mathrm {n}}s+\omega _{\mathrm {n}}^{2}} \ \)を考える。ここで,\( \ \omega _{\mathrm {n}} \ \mathrm {[rad/s]} \ \)は固有角周波数,\( \ \zeta \ \)は減衰係数であり,\( \ \omega _{\mathrm {n}} >0 \ \),\( \ \displaystyle 0<\zeta <\frac {\sqrt {2}}{2} \ \)とする。周波数応答の振幅\( \ \left| G(\mathrm {j}\omega ) \right| \ \)が\( \ \displaystyle \left| G(\mathrm {j}\omega ) \right| =\frac {1}{\sqrt {\left( 1-x\right) ^{2}+4\zeta ^{2}x}} \ \)で与えられることを示せ。ただし,\( \ \displaystyle x≜\left( \frac {\omega }{\omega _{\mathrm {n}}}\right) ^{2} \ \)とする。
(2) 関数\( \ f(x)=\left( 1-x\right) ^{2}+4\zeta ^{2}x \ \)を最小にする\( \ x \ \)を\( \ x_{\mathrm {p}} \ \)とするとき,\( \ x_{\mathrm {p}} \ \)を\( \ \zeta \ \)で表せ。また,周波数応答の振幅\( \ \left| G(\mathrm {j}\omega ) \right| \ \)の最大値\( \ M_{\mathrm {p}} \ \)を\( \ \zeta \ \)で表せ。
(3) 図のフィードバック制御系の閉ループ伝達関数\( \ G_{\mathrm {c}}(s) \ \)を求めよ。また,\( \ \omega _{\mathrm {n}} \ \)及び\( \ \zeta \ \)の値を求めよ。
(4) 小問(3)で求めた閉ループ伝達関数\( \ G_{\mathrm {c}}(s) \ \)の周波数応答の振幅を最大にする角周波数\( \ \omega _{\mathrm {p}} \ \mathrm {[rad/s]} \ \)及び最大振幅\( \ M_{\mathrm {p}} \ \)の値を求めよ。
【ワンポイント解説】
1種には珍しい古典制御からオーソドックスな出題となっています。比較的時間も余裕のある問題なので,計算ミスに注意して確実に点を取りたい問題と言えるでしょう。
【解答】
(1)周波数応答の振幅\( \ \left| G(\mathrm {j}\omega ) \right| \ \)が\( \ \displaystyle \left| G(\mathrm {j}\omega ) \right| =\frac {1}{\sqrt {\left( 1-x\right) ^{2}+4\zeta ^{2}x}} \ \)で与えられることを示す
\( \ 2 \ \)次遅れ系の標準形\( \ \displaystyle G(s)=\frac {\omega _{\mathrm {n}}^{2}}{s^{2}+2\zeta \omega _{\mathrm {n}}s+\omega _{\mathrm {n}}^{2}} \ \)の周波数応答を求めるため,\( \ s=\mathrm {j}\omega \ \)を代入すると,
\[
\begin{eqnarray}
G(\mathrm {j}\omega )&=&\frac {\omega _{\mathrm {n}}^{2}}{-\omega ^{2}+\mathrm {j}2\zeta \omega _{\mathrm {n}}\omega +\omega _{\mathrm {n}}^{2}} \\[ 5pt ]
&=&\frac {1}{\displaystyle 1-\frac {\omega ^{2}}{\omega _{\mathrm {n}} ^{2}}+\mathrm {j}2\zeta \frac {\omega }{\omega _{\mathrm {n}}}} \\[ 5pt ]
\end{eqnarray}
\]
であるから,その絶対値は,
\[
\begin{eqnarray}
\left| G(\mathrm {j}\omega ) \right| &=&\frac {1}{\displaystyle \sqrt { \left( 1-\frac {\omega ^{2}}{\omega _{\mathrm {n}} ^{2}}\right) ^{2}+4\zeta ^{2}\left( \frac {\omega }{\omega _{\mathrm {n}}}\right) ^{2}}} \\[ 5pt ]
&=&\frac {1}{\displaystyle \sqrt { \left( 1-x\right) ^{2}+4\zeta ^{2}x}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)\( \ x_{\mathrm {p}} \ \)及び\( \ M_{\mathrm {p}} \ \)を\( \ \zeta \ \)で表す
\( \ f(x)=\left( 1-x\right) ^{2}+4\zeta ^{2}x \ \)を展開すると,
\[
\begin{eqnarray}
f(x) &=&1-2x+x^{2}+4\zeta ^{2}x \\[ 5pt ]
&=&x^{2}+\left( 4\zeta ^{2}-2\right) x+1 \\[ 5pt ]
\end{eqnarray}
\]
となるので,両辺微分すると,
\[
\begin{eqnarray}
\frac {\mathrm {d}f(x)}{\mathrm {d}x} &=&2x+4\zeta ^{2}-2 \\[ 5pt ]
\end{eqnarray}
\]
となり,最小値をとるのは\( \ \displaystyle \frac {\mathrm {d}f(x)}{\mathrm {d}x}=0 \ \)の時であるから,
\[
\begin{eqnarray}
2x_{\mathrm {p}}+4\zeta ^{2}-2 &=&0 \\[ 5pt ]
x_{\mathrm {p}} &=&1-2\zeta ^{2} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。よって,周波数応答の振幅最大値\( \ M_{\mathrm {p}} \ \)は,
\[
\begin{eqnarray}
M_{\mathrm {p}} &=&\frac {1}{\displaystyle \sqrt { \left( 1-x_{\mathrm {p}} \right) ^{2}+4\zeta ^{2}x_{\mathrm {p}} }} \\[ 5pt ]
&=&\frac {1}{\displaystyle \sqrt { \left\{ 1-\left( 1-2\zeta ^{2}\right) \right\} ^{2}+4\zeta ^{2}\left( 1-2\zeta ^{2}\right) }} \\[ 5pt ]
&=&\frac {1}{\displaystyle \sqrt { 4\zeta ^{4}+4\zeta ^{2}-8\zeta ^{4} }} \\[ 5pt ]
&=&\frac {1}{\displaystyle \sqrt { 4\zeta ^{2}-4\zeta ^{4} }} \\[ 5pt ]
&=&\frac {1}{\displaystyle 2\zeta \sqrt { 1-\zeta ^{2} }} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(3)閉ループ伝達関数\( \ G_{\mathrm {c}}(s) \ \),\( \ \omega _{\mathrm {n}} \ \)及び\( \ \zeta \ \)の値
問題図より,
\[
\begin{eqnarray}
\left\{ R(s)-Y(s)\right\} \frac {4}{s\left( 1+0.25s\right) }&=&Y(s) \\[ 5pt ]
4R(s)-4Y(s)&=&s\left( 1+0.25s\right) Y(s) \\[ 5pt ]
4R(s)&=&\left( 0.25s^{2}+s+4\right) Y(s) \\[ 5pt ]
\frac {Y(s)}{R(s)}&=&\frac {4}{0.25s^{2}+s+4} \\[ 5pt ]
G_{\mathrm {c}}(s) &=&\frac {16}{s^{2}+4s+16} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。これを\( \ 2 \ \)次遅れ系の標準形\( \ \displaystyle G(s)=\frac {\omega _{\mathrm {n}}^{2}}{s^{2}+2\zeta \omega _{\mathrm {n}}s+\omega _{\mathrm {n}}^{2}} \ \)と係数比較すると,
\[
\begin{eqnarray}
\omega _{\mathrm {n}}^{2} &=&16 \\[ 5pt ]
2\zeta \omega _{\mathrm {n}} &=&4 \\[ 5pt ]
\end{eqnarray}
\]
となるので,これらの方程式を解くと,
\[
\begin{eqnarray}
\omega _{\mathrm {n}} &=&4 \ \mathrm {[rad /s]} \\[ 5pt ]
\zeta &=&0.5 \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(4)周波数応答の振幅を最大にする角周波数\( \ \omega _{\mathrm {p}} \ \mathrm {[rad/s]} \ \)及び最大振幅\( \ M_{\mathrm {p}} \ \)の値
(2)より,\( \ G_{\mathrm {c}}(s) \ \)の周波数応答の振幅を最大にする角周波数\( \ \omega _{\mathrm {p}} \ \mathrm {[rad/s]} \ \)を満たす条件は,
\[
\begin{eqnarray}
x_{\mathrm {p}}&=&\left( \frac {\omega _{\mathrm {p}}}{\omega _{\mathrm {n}}}\right) ^{2} \\[ 5pt ]
\omega _{\mathrm {p}}&=&\omega _{\mathrm {n}}\sqrt {x_{\mathrm {p}}} \\[ 5pt ]
&=&\omega _{\mathrm {n}}\sqrt {1-2\zeta ^{2}} \\[ 5pt ]
&=&4\times \sqrt {1-2\times 0.5 ^{2}} \\[ 5pt ]
&≒&2.8284 → 2.83 \ \mathrm {[rad /s]} \\[ 5pt ]
\end{eqnarray}
\]
となり,最大振幅\( \ M_{\mathrm {p}} \ \)の値は,
\[
\begin{eqnarray}
M_{\mathrm {p}} &=&\frac {1}{\displaystyle 2\zeta \sqrt { 1-\zeta ^{2} }} \\[ 5pt ]
&=&\frac {1}{\displaystyle 2\times 0.5 \sqrt { 1-0.5 ^{2} }} \\[ 5pt ]
&≒&1.1547 → 1.15 \\[ 5pt ]
\end{eqnarray}
\]
と求められる。














 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん