Contents
【問題】
【難易度】★★★☆☆(普通)
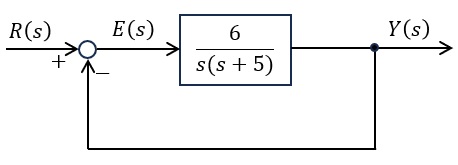
図のようなフィードバック制御系について,次の問に答えよ。ただし,\( \ R(s) \ \)は目標値,\( \ Y(s) \ \)は出力,\( \ E(s) \ \)は偏差とする。また,(1)及び(4)の答は平方根を含む形でよい。
(1) \( \ R(s) \ \)から\( \ Y(s) \ \)までの伝達関数\( \ G(s) \ \)を求め,その減衰定数\( \ \zeta \ \)を求めよ。
(2) 目標値\( \ R(s) \ \)の時間関数\( \ r(t) \ \)が単位ステップ関数のときの出力\( \ Y(s) \ \)の時間応答(ステップ応答)\( \ y(t) \ \)を求めよ。
(3) 目標値\( \ R(s) \ \)から偏差\( \ E(s) \ \)までの伝達関数\( \ H(s) \ \)を求め,その周波数特性\( \ H(j\omega ) \ \)のゲイン特性を考える。正弦波目標値\( \ R(s) \ \)の時間関数が\( \ r(t) =\sin \omega t \ \)のとき,角周波数\( \ \omega \ \)が高くなるにつれて偏差\( \ E(s) \ \)の時間関数\( \ e(t) \ \)の振幅はどうなるかを理由を添えて答えよ。
(4) 上記(3)において,\( \ \omega = 1 \ \mathrm {[rad/s]} \ \)のときの偏差\( \ e(t) \ \)の振幅を求めよ。
【ワンポイント解説】
フィードバック制御系の伝達関数や振幅を求める問題です。
伝達関数を求めて部分分数分解を使用し逆ラプラス変換を使用する等いかにも\( \ 2 \ \)種らしい問題と言えます。
自動制御は計算力が必要となる分野ですので,しっかりと本番までに計算力を磨いていくようにして下さい。
1.基本的なラプラス変換
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると以下のような関係があります。
\[
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
{\displaystyle \delta (t) }\atop{単位インパルス関数} & 1 \\[ 5pt ]
{\displaystyle u (t) }\atop{単位ステップ関数} & \displaystyle \frac {1}{s} \\[ 5pt ]
K & \displaystyle \frac {K}{s} \\[ 5pt ]
t & \displaystyle \frac {1}{s^{2}} \\[ 5pt ]
\mathrm {e}^{at} & \displaystyle \frac {1}{s-a} \\[ 5pt ]
\sin \omega t & \displaystyle \frac {\omega }{s^{2}+\omega ^{2}} \\[ 5pt ]
\cos \omega t & \displaystyle \frac {s}{s^{2}+\omega ^{2}} \\[ 5pt ]
\displaystyle \frac {\mathrm {d}f\left( t \right) }{\mathrm {d}t} & sF\left( s \right) -f\left( 0 \right) \\[ 5pt ]
\displaystyle \int f\left( t \right) \mathrm {d}t & \displaystyle \frac {F\left( s \right) }{s}+\frac {1}{s}\int _{-\infty }^{0}f\left( \tau \right) \mathrm {d}\tau \\[ 5pt ]
\hline
\end{array}
\]
2.ブロック線図の考え方
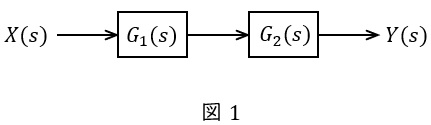
①直列
図1のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
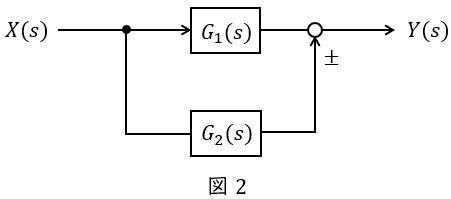
②並列
図2のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)±G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
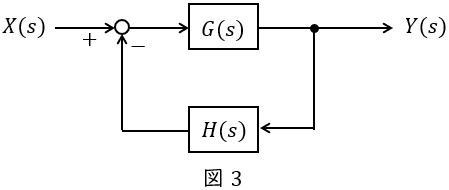
③フィードバック
図3のような\( \ G(s) \ \),\( \ H(s) \ \)が与えられているとき,全体の伝達関数\( \ W(s) \ \)は,
\[
\begin{eqnarray}
Y(s)&=&\left\{ X(s) -H(s)Y(s) \right\} G(s) \\[ 5pt ]
Y(s)&=&G(s)X(s) -G(s)H(s)Y(s) \\[ 5pt ]
Y(s)+G(s)H(s)Y(s) &=&G(s)X(s) \\[ 5pt ]
\left\{ 1+G(s)H(s)\right\} Y(s) &=&G(s)X(s) \\[ 5pt ]
\frac {Y(s)}{X(s)}&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
W(s)&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
\end{eqnarray}
\]
となります。
3.減衰係数\( \ \zeta \ \)と固有角周波数\( \ \omega _{\mathrm {n}} \ \)
\( \ 2 \ \)次遅れの伝達関数\( \ W(s) \ \)の一般式は,減衰係数\( \ \zeta \ \),固有角周波数\( \ \omega _{\mathrm {n}} \ \)とすると,
\[
\begin{eqnarray}
W(s)&=&\frac {\omega _{\mathrm {n}}^{2}}{s^{2}+2\zeta \omega _{\mathrm {n}}s+\omega _{\mathrm {n}}^{2}} \\[ 5pt ]
\end{eqnarray}
\]
で表されます。
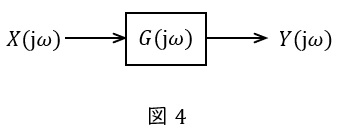
4.周波数伝達関数の振幅(ゲイン)と位相
図4のブロック線図に示されるような周波数伝達関数\( \ G ( \mathrm {j}\omega ) =a+\mathrm {j}b \ \)があるとき,
\[
\begin{eqnarray}
Y( \mathrm {j}\omega )&=&G ( \mathrm {j}\omega ) X ( \mathrm {j}\omega ) \\[ 5pt ]
\end{eqnarray}
\]
となりますが,このときの振幅(ゲイン)は,
\[
\begin{eqnarray}
\left| G ( \mathrm {j}\omega ) \right| &=&\sqrt {a^{2}+b^{2}} \\[ 5pt ]
\end{eqnarray}
\]
となり,位相\( \ \theta \ \)は,
\[
\begin{eqnarray}
\theta &=&\tan ^{-1} \frac {b}{a} \\[ 5pt ]
\end{eqnarray}
\]
で求められます。これを時間関数で表すと,例えば時間関数\( \ x(t) =\sin \omega t \ \)を入力したときの出力は,
\[
\begin{eqnarray}
y(t) &=&\left| G ( \mathrm {j}\omega ) \right| \sin \left( \omega t +\theta \right) \\[ 5pt ]
\end{eqnarray}
\]
となります。
【解答】
(1)\( \ R(s) \ \)から\( \ Y(s) \ \)までの伝達関数\( \ G(s) \ \)と減衰定数\( \ \zeta \ \)
\( \ R(s) \ \)から\( \ Y(s) \ \)までの伝達関数\( \ G(s) \ \)は,ワンポイント解説「2.ブロック線図の考え方」の通り,
\[
\begin{eqnarray}
G(s)&=&\frac {\displaystyle \frac {6}{s (s+5) }}{\displaystyle 1+\frac {6}{s (s+5) }} \\[ 5pt ]
&=&\frac {\displaystyle \frac {6}{s (s+5) }}{\displaystyle \frac {s (s+5) +6}{s (s+5) }} \\[ 5pt ]
&=&\frac {6}{s (s+5) +6} \\[ 5pt ]
&=&\frac {6}{s^{2}+5s+6} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。これより減衰定数\( \ \zeta \ \),固有角周波数\( \ \omega _{n} \ \)とすれば,ワンポイント解説「3.減衰係数\( \ \zeta \ \)と固有角周波数\( \ \omega _{\mathrm {n}} \ \)」の通り,
\[
\begin{eqnarray}
2\zeta \omega _{\mathrm {n}} &=&5 &・・・・・・・・・ ①& \\[ 5pt ]
{\omega _{n}}^{2} &=&6 &・・・・・・・・・ ②& \\[ 5pt ]
\end{eqnarray}
\]
となるので,②より\( \ \omega _{n}=\sqrt {6} \ \)であるから,これを①に代入すると,
\[
\begin{eqnarray}
2\zeta \times \sqrt {6} &=&5 \\[ 5pt ]
\zeta &=&\frac {5}{2\sqrt {6}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)出力\( \ Y(s) \ \)の時間応答(ステップ応答)\( \ y(t) \ \)
単位ステップ応答のラプラス変換は,ワンポイント解説「1.基本的なラプラス変換」の通り\( \ \displaystyle \frac {1}{s} \ \)であるから,(1)解答式より,
\[
\begin{eqnarray}
Y(s)&=&\frac {6}{s^{2}+5s+6} R(s) \\[ 5pt ]
&=&\frac {6}{s^{2}+5s+6} \times \frac {1}{s} \\[ 5pt ]
&=&\frac {6}{s\left( s+2\right) \left( s+3\right) } \\[ 5pt ]
\end{eqnarray}
\]
となる。これを部分分数分解するために\( \ \displaystyle Y(s)=\frac {A}{s}+\frac {B}{s+2}+\frac {C}{s+3} \ \)とおくと,
\[
\begin{eqnarray}
Y(s)&=&\frac {A}{s}+\frac {B}{s+2}+\frac {C}{s+3} \\[ 5pt ]
&=&\frac {A\left( s+2\right) \left( s+3\right) +Bs \left( s+3\right) +Cs \left( s+2\right) }{s\left( s+2\right) \left( s+3\right) } \\[ 5pt ]
&=&\frac {A\left( s^{2}+5s+6\right) +B \left( s^{2}+3s\right) +C \left( s^{2}+2s\right) }{s\left( s+2\right) \left( s+3\right) } \\[ 5pt ]
&=&\frac {\left( A+B+C\right) s^{2} +\left( 5A+3B+2C\right) s+6A }{s\left( s+2\right) \left( s+3\right) } \\[ 5pt ]
\end{eqnarray}
\]
となるので,係数比較すると,
\[
\begin{eqnarray}
A+B+C&=&0 &・・・・・・・・・ ③& \\[ 5pt ]
5A+3B+2C&=&0 &・・・・・・・・・ ④& \\[ 5pt ]
6A&=&6 &・・・・・・・・・ ⑤& \\[ 5pt ]
\end{eqnarray}
\]
となる。⑤より\( \ A=1 \ \)となるため,これを③及び④に代入すると,
\[
\begin{eqnarray}
1+B+C&=&0 && \\[ 5pt ]
B+C&=&-1 &・・・・・・・・・ ③^{\prime }& \\[ 5pt ]
5+3B+2C&=&0 && \\[ 5pt ]
3B+2C&=&-5 &・・・・・・・・・ ④^{\prime }& \\[ 5pt ]
\end{eqnarray}
\]
となるから,\( \ ④^{\prime }-2\times ③^{\prime } \ \)及び\( \ 3\times ③^{\prime }-④^{\prime } \ \)より,
\[
\begin{eqnarray}
B&=&-3 \\[ 5pt ]
C&=&2 \\[ 5pt ]
\end{eqnarray}
\]
となる。よって,\( \ \displaystyle Y(s)=\frac {1}{s}-\frac {3}{s+2}+\frac {2}{s+3} \ \)と部分分数分解ができるので,これを逆ラプラス変換すると,ワンポイント解説「1.基本的なラプラス変換」の通り,
\[
\begin{eqnarray}
y(t)&=&1-3\mathrm {e}^{-2t}+2\mathrm {e}^{-3t} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(3)目標値\( \ R(s) \ \)から偏差\( \ E(s) \ \)までの伝達関数\( \ H(s) \ \),角周波数\( \ \omega \ \)が高くなるにつれて\( \ e(t) \ \)の振幅はどうなるか
\( \ R(s) \ \)と\( \ E(s) \ \)の関係式は,
\[
\begin{eqnarray}
R(s)-\frac {6}{s (s+5) }E(s)&=&E(s) \\[ 5pt ]
\end{eqnarray}
\]
となるので,これを整理すると,
\[
\begin{eqnarray}
R(s)&=&E(s)+\frac {6}{s (s+5) }E(s) \\[ 5pt ]
&=&\frac {s (s+5) +6}{s (s+5) }E(s) \\[ 5pt ]
&=&\frac {s^{2}+5s+6}{s^{2}+5s}E(s) \\[ 5pt ]
\frac {E(s)}{R(s)}&=&\frac {s^{2}+5s}{s^{2}+5s+6} \\[ 5pt ]
H(s)&=&\frac {s^{2}+5s}{s^{2}+5s+6} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。次に,\( \ H(s) \ \)の周波数伝達関数\( \ H( j\omega ) \ \)は,
\[
\begin{eqnarray}
H( j\omega )&=&\frac {-\omega ^{2}+j5\omega }{-\omega ^{2}+j5\omega +6} \\[ 5pt ]
&=&\frac {-\omega ^{2}+j5\omega }{6-\omega ^{2}+j5\omega } \\[ 5pt ]
\end{eqnarray}
\]
となり,振幅\( \ \left| H( j\omega ) \right| \ \)は,
\[
\begin{eqnarray}
\left| H( j\omega ) \right| &=&\frac {\sqrt {\omega ^{4}+25\omega ^{2}}}{\sqrt {\left( 6-\omega ^{2}\right) ^{2}+25\omega ^{2}}} \\[ 5pt ]
&=&\frac {\sqrt {\omega ^{4}+25\omega ^{2}}}{\sqrt {\omega ^{4}-12\omega ^{2}+36+25\omega ^{2}}} \\[ 5pt ]
&=&\sqrt {\frac {\omega ^{4}+25\omega ^{2}}{\omega ^{4}+13\omega ^{2}+36}} \\[ 5pt ]
\end{eqnarray}
\]
となる。角周波数\( \ \omega \ \)が高い場合,すなわち\( \ \omega →\infty \ \)とすると,
\[
\begin{eqnarray}
\displaystyle \lim_{ \omega \to \infty } \left| H( j\omega ) \right| &=&\displaystyle \lim_{ \omega \to \infty } \sqrt {\frac {\omega ^{4}+25\omega ^{2}}{\omega ^{4}+13\omega ^{2}+36}} \\[ 5pt ]
&=&\displaystyle \lim_{ \omega \to \infty } \sqrt {\frac {\displaystyle 1+\frac {25}{\omega ^{2}}}{\displaystyle 1+\frac {13}{\omega ^{2}}+\frac {36}{\omega ^{4}}}} \\[ 5pt ]
&=&1 \\[ 5pt ]
\end{eqnarray}
\]
となるので,振幅は\( \ 1 \ \)に収束していく。
(4)\( \ \omega = 1 \ \mathrm {[rad/s]} \ \)のときの偏差\( \ e(t) \ \)の振幅
(3)で求めた振幅\( \ \left| H( j\omega ) \right| \ \)に\( \omega =1 \ \)を代入すると,
\[
\begin{eqnarray}
\left| H( j1 ) \right| &=&\sqrt {\frac {1 ^{4}+25\times 1 ^{2}}{1^{4}+13\times 1 ^{2}+36}} \\[ 5pt ]
&=&\sqrt {\frac {26}{50}} \\[ 5pt ]
&=&\sqrt {\frac {13}{25}} \\[ 5pt ]
&=&\frac {\sqrt {13}}{5} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。











 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】







 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは