Contents
【問題】
【難易度】★★★☆☆(普通)
次の文章は,電力系統の安定度に関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる語句を解答群の中から選び,その記号をマークシートに記入しなさい。
電力系統の安定度を一機無限大母線系統の動揺方程式である次式で考える。
\[
\begin{eqnarray}
M\frac {\mathrm {d}^{2}\delta }{\mathrm {d}t^{2}} &=& P_{M}-\frac {V_{0}V_{G}}{X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
上式の\( \ V_{0} \ \),\( \ V_{G} \ \)はそれぞれ無限大母線電圧及び発電機内部電圧の大きさ,\( \ \delta \ \)は両者の相差角,\( \ M \ \)は発電機の慣性定数であり,右辺第\( \ 1 \ \)項の\( \ P_{M} \ \)は発電機への機械入力,第\( \ 2 \ \)項は\( \ \fbox { (1) } \ \)出力である。過渡安定度解析で用いられる最も簡略な発電機モデルは\( \ \fbox { (2) } \ \)リアクタンス背後電圧一定モデルであるが,その場合,上式の\( \ X \ \)は送電線,変圧器などのリアクタンスと発電機の\( \ \fbox { (2) } \ \)リアクタンスの和である。
上式で考えると,\( \ \fbox { (3) } \ \)安定極限電力は\( \ \displaystyle \frac {V_{0}V_{G}}{X} \ \)であり,そのとき\( \ \displaystyle \delta =\frac {\pi }{2} \ \mathrm {[rad]} \ \)である。機械入力\( \ P_{M} \ \)が\( \ \fbox { (3) } \ \)安定極限電力より小さいとき,発電機の入出力が等しくなる\( \ \delta \ \)は\( \ 2 \ \)点あり,\( \ \displaystyle \delta \lt \frac {\pi }{2} \ \mathrm {[rad]} \ \)の点は\( \ \fbox { (1) } \ \)出力を\( \ \delta \ \)で微分した\( \ \fbox { (4) } \ \)係数が正で安定平衡点,\( \ \displaystyle \delta \gt \frac {\pi }{2} \ \mathrm {[rad]} \ \)の点は\( \ \fbox { (4) } \ \)係数が負で不安定平衡点と呼ばれる。後者の運転状態では\( \ \fbox { (3) } \ \)安定度が不安定となる。安定平衡点にあった発電機が何らかの外乱で加速され,\( \ \delta \ \)が不安定平衡点より少しでも大きくなると発電機は\( \ \fbox { (5) } \ \)する。
〔問3の解答群〕
\[
\begin{eqnarray}
&(イ)& 電 圧 &(ロ)& 同期化力 &(ハ)& 電 気 \\[ 5pt ]
&(ニ)& 減 速 &(ホ)& 機 械 &(ヘ)& 過 渡 \\[ 5pt ]
&(ト)& 無 効 &(チ)& 漏 れ &(リ)& 定 態 \\[ 5pt ]
&(ヌ)& 脱 調 &(ル)& 出 力 &(ヲ)& 動 的 \\[ 5pt ]
&(ワ)& 制動力 &(カ)& 同 期 &(ヨ)& 安定化 \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
電力系統の安定度に関する問題です。
動揺方程式自体は専門性が高い内容となりますので,動揺方程式を理解するというよりは様々な知識を駆使して解いていくと良い問題かと思います。
1.同期発電機の出力
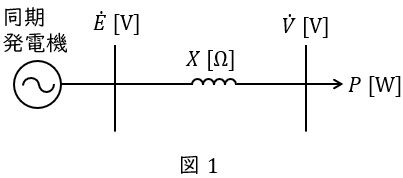
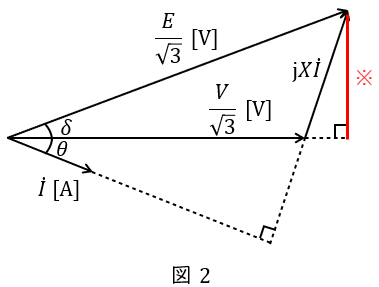
同期発電機の内部誘導起電力が\( \ E \ \mathrm {[V]} \ \),端子電圧が\( \ V \ \mathrm {[V]} \ \),\( \ 1 \ \)相あたりの同期リアクタンスが\( \ X \ \mathrm {[\Omega ]} \ \)(抵抗分は無視できるものとします),電機子電流が\( \ I \ \mathrm {[A]} \ \)であるとすると,回路図は図1,ベクトル図は図2のように描くことができます。ただし,\( \ \delta \ \mathrm {[rad]} \ \)は内部誘導起電力と端子電圧の相差角,\( \ \theta \ \mathrm {[rad]} \ \)は力率角です。
このとき,発電機の出力\( \ P \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P&=&\sqrt {3} VI\cos \theta \\[ 5pt ]
\end{eqnarray}
\]
で求めることができ,図2の※線を求める式より,
\[
\begin{eqnarray}
XI\cos \theta &=&\frac {E}{\sqrt {3}}\sin \delta \\[ 5pt ]
I\cos \theta &=&\frac {E}{\sqrt {3}X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
となるので,
\[
\begin{eqnarray}
P&=&\sqrt {3} VI\cos \theta \\[ 5pt ]
&=&\sqrt {3} V\cdot \frac {E}{\sqrt {3}X}\sin \delta \\[ 5pt ]
&=&\frac {EV}{X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
となります。上式は\( \ P=\sqrt {3} VI\cos \theta \ \)と合わせて公式として覚えておきましょう。
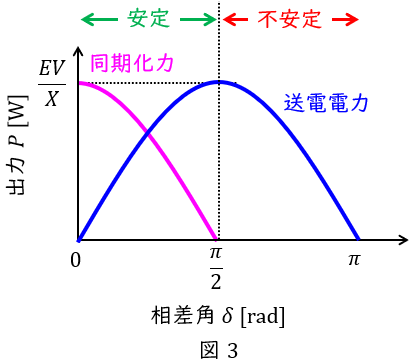
2.同期化力
同期発電機の同期外れの起こりにくさすなわち定態安定度を表す指標で,出力\( \ P \ \mathrm {[W]} \ \)を相差角\( \ \delta \ \mathrm {[rad]} \ \)で微分した\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta } \ \)で求められます。したがって,
\[
\begin{eqnarray}
\frac {\mathrm {d}P}{\mathrm {d}\delta }&=&\frac {EV}{X}\cos \delta \\[ 5pt ]
\end{eqnarray}
\]
となり,\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta }\gt 0 \ \)のとき安定,\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta }\lt 0 \ \)のとき不安定,すなわち\( \ \displaystyle 0 \lt \delta \lt \frac {\pi }{2} \ \)のとき安定,\( \ \displaystyle \frac {\pi }{2} \lt \delta \lt \pi \ \)のとき不安定となります。\( \ \displaystyle \delta =\frac {\pi }{2} \ \mathrm {[rad]} \ \)のとき安定限界となります。
3.発電機の動揺方程式
慣性定数を\( \ M \ \),発電機の機械的入力を\( \ P_{\mathrm {m}} \ \),発電機出力を\( \ P_{\mathrm {e}} \ \)とすると,発電機の回転角速度\( \ \omega \ \)との間には,
\[
\begin{eqnarray}
M\frac {\mathrm {d}\omega }{\mathrm {d}t}&=&P_{\mathrm {m}}-P_{\mathrm {e}} \\[ 5pt ]
\end{eqnarray}
\]
の関係があり,相差角を\( \ \delta \ \)とすれば,\( \ \displaystyle \omega =\frac {\mathrm {d}\delta }{\mathrm {d}t} \ \)であるから,
\[
\begin{eqnarray}
M\frac {\mathrm {d}^{2}\delta }{\mathrm {d}t^{2}}&=&P_{\mathrm {m}}-P_{\mathrm {e}} \\[ 5pt ]
\end{eqnarray}
\]
となり,これを動揺方程式といいます。
【解答】
(1)解答:ハ
題意より,解答候補は(ハ)電気,(ホ)機械,(ト)無効,等になると思います。
ワンポイント解説「3.発電機の動揺方程式」の通り,動揺方程式の第\( \ 2 \ \)項は電気出力となります。
(2)解答:ヘ
題意より,解答候補は(ヘ)過渡,(チ)漏れ,(カ)同期,等になると思います。
過渡安定度解析で用いられる最も簡略な発電機モデルは過渡リアクタンス背後電圧一定モデルといいます。このモデルは系統事故等の発生後\( \ 1 \ \)秒程度以内での発電機動揺について解析することに利用されます。
(3)解答:リ
題意より,解答候補は(イ)電圧,(ヘ)過渡,(リ)定態,(ヲ)動的,(カ)同期,等になると思います。
ワンポイント解説「1.同期発電機の出力」及び「2.同期化力」の通り,\( \ \displaystyle \delta =\frac {\pi }{2} \ \mathrm {[rad]} \ \)のときの電力\( \ \displaystyle \frac {V_{0}V_{G}}{X} \ \)を定態安定極限電力といいます。
(4)解答:ロ
題意より,解答候補は(ロ)同期化力,(ワ)制動力,(ヨ)安定化,等になると思います。
ワンポイント解説「2.同期化力」の通り,電気出力\( \ \displaystyle \frac {V_{0}V_{G}}{X}\sin \delta \ \)を\( \ \delta \ \)で微分した\( \ \displaystyle \frac {V_{0}V_{G}}{X}\cos \delta \ \)を同期化力(係数)といいます
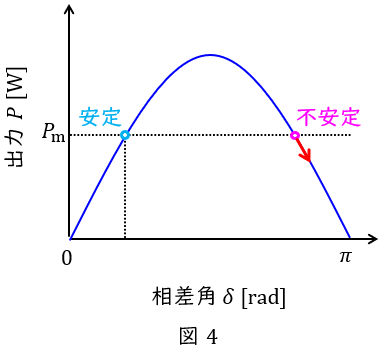
(5)解答:ヌ
題意より,解答候補は(ニ)減速,(ヌ)脱調,(ヨ)安定化,等になると思います。
図4に示すように\( \ \delta \ \)が不安定平衡点より少しでも大きくなると機械入力よりも電気入力が小さくなり,発電機はさらに加速され脱調します。










 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】







 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは