Contents
【問題】
【難易度】★★★☆☆(普通)
図のような制御系について,次の問に答えよ。
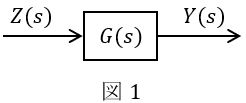
(1) 図1のブロック線図において,\( \ \displaystyle G(s)=\frac {1}{Js} \ \)のとき,正弦波入力\( \ z(t)=\mathcal {L}^{-1}\left[ Z (s)\right]=\sin 2t \ \)を加えて,十分に時間が経過したときの出力応答\( \ y (t) \ \)を求めよ。ただし,\( \ \mathcal {L}^{-1} \ \)はラプラス逆変換を表す。
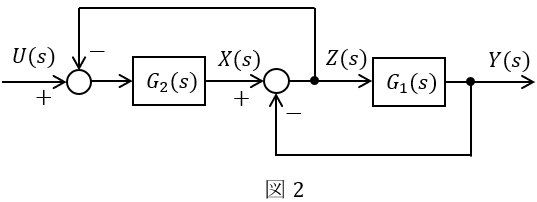
(2) 図2のプロック線図において,入力\( \ U(s) \ \)から出力\( \ Y(s) \ \)までの伝達関数を\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)を用いて表せ。
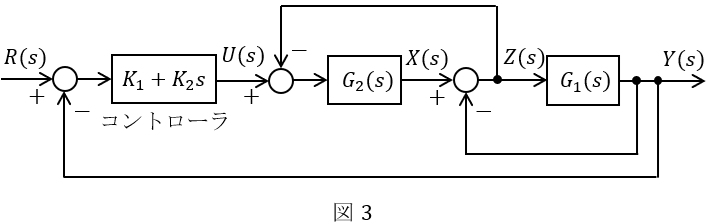
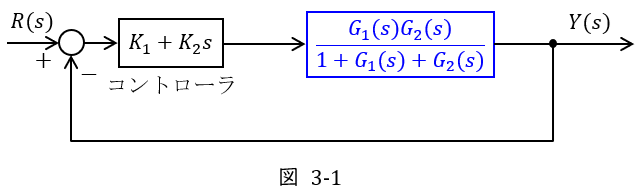
(3) 図3は,図2の系を制御対象とするフィードバック制御系を示す。ここで,\( \ \displaystyle G_{1}(s)=\frac {1}{s} \ \),\( \ \displaystyle G_{2}(s)=\frac {1}{2s} \ \)としたとき,目標値\( \ R(s) \ \)から出力(制御量)\( \ Y(s) \ \)までの閉ループ伝達関数の極をすべて\( \ -10 \ \)にするためのコントローラのパラメータ\( \ K_{1} \ \),\( \ K_{2} \ \)の値を求めよ。
【ワンポイント解説】
フィードバック制御の出力応答や伝達関数等を考える問題です。
考え方自体は難解ではありませんが,計算量が多いため,\( \ 30 \ \)分という時間制約では結構厳しかったかもしれません。
計算間違いをしないよう確実に解いていくようにして下さい。
1.基本的なラプラス変換
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると以下のような関係があります。
\[
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
{\displaystyle \delta (t) }\atop{単位インパルス関数} & 1 \\[ 5pt ]
{\displaystyle u (t) }\atop{単位ステップ関数} & \displaystyle \frac {1}{s} \\[ 5pt ]
K & \displaystyle \frac {K}{s} \\[ 5pt ]
t & \displaystyle \frac {1}{s^{2}} \\[ 5pt ]
\mathrm {e}^{at} & \displaystyle \frac {1}{s-a} \\[ 5pt ]
\sin \omega t & \displaystyle \frac {\omega }{s^{2}+\omega ^{2}} \\[ 5pt ]
\cos \omega t & \displaystyle \frac {s}{s^{2}+\omega ^{2}} \\[ 5pt ]
\displaystyle \frac {\mathrm {d}f\left( t \right) }{\mathrm {d}t} & sF\left( s \right) -f\left( 0 \right) \\[ 5pt ]
\displaystyle \int f\left( t \right) \mathrm {d}t & \displaystyle \frac {F\left( s \right) }{s}+\frac {1}{s}\int _{-\infty }^{0}f\left( \tau \right) \mathrm {d}\tau \\[ 5pt ]
\hline
\end{array}
\]
2.ブロック線図の考え方
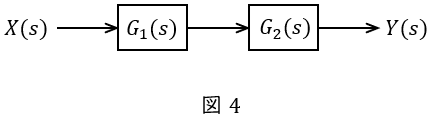
①直列
図4のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
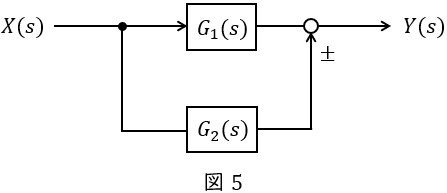
②並列
図5のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)±G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
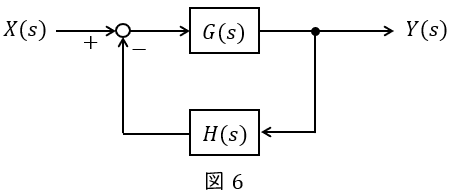
③フィードバック
図6のような\( \ G(s) \ \),\( \ H(s) \ \)が与えられているとき,全体の伝達関数\( \ W(s) \ \)は,
\[
\begin{eqnarray}
Y(s)&=&\left\{ X(s) -H(s)Y(s) \right\} G(s) \\[ 5pt ]
Y(s)&=&G(s)X(s) -G(s)H(s)Y(s) \\[ 5pt ]
Y(s)+G(s)H(s)Y(s) &=&G(s)X(s) \\[ 5pt ]
\left\{ 1+G(s)H(s)\right\} Y(s) &=&G(s)X(s) \\[ 5pt ]
\frac {Y(s)}{X(s)}&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
W(s)&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
\end{eqnarray}
\]
となります。
3.伝達関数の極と零点
伝達関数\( \ G (s) \ \)が,
\[
\begin{eqnarray}
G (s)&=&\frac {\left( s-a_{1} \right) \left( s-a_{2} \right) \cdots \left( s-a_{n} \right) }{\left( s-b_{1} \right) \left( s-b_{2} \right) \cdots \left( s-b_{n} \right) } \\[ 5pt ]
\end{eqnarray}
\]
で表されるとき,伝達関数が値が定まらない(無限大になる)\( \ s \ \)の値を極,伝達関数が\( \ 0 \ \)になる\( \ s \ \)の値を零点といいます。したがって,上式における極は分母の値が\( \ 0 \ \)となる\( \ s=b_{1},b_{2},\cdots ,b_{n} \ \),零点は分子の値が\( \ 0 \ \)となる\( \ s=a_{1},a_{2},\cdots ,a_{n} \ \)となります。
【解答】
(1)正弦波入力\( \ z(t)=\mathcal {L}^{-1}\left[ Z (s)\right]=\sin 2t \ \)を加えて,十分に時間が経過したときの出力応答\( \ y (t) \ \)
\( \ z(t)=\sin 2t \ \)をラプラス変換すると,ワンポイント解説「1.基本的なラプラス変換」の通り,
\[
\begin{eqnarray}
Z (s)&=&\frac {2}{s^{2}+4} \\[ 5pt ]
\end{eqnarray}
\]
となるから,\( \ Y(s) \ \)は,
\[
\begin{eqnarray}
Y(s)&=&G(s)Z (s) \\[ 5pt ]
&=&\frac {1}{Js}\frac {2}{s^{2}+4} \\[ 5pt ]
&=&\frac {1}{J}\frac {2}{s\left( s^{2}+4\right) } \\[ 5pt ]
\end{eqnarray}
\]
となる。ここで,\( \ \displaystyle \frac {2}{s\left( s^{2}+4\right) }=\frac {A}{s}+\frac {Bs+C}{s^{2}+4} \ \)とおけば,
\[
\begin{eqnarray}
\frac {2}{s\left( s^{2}+4\right) }&=&\frac {A}{s}+\frac {Bs+C}{s^{2}+4} \\[ 5pt ]
&=&\frac {A\left( s^{2}+4\right) +s\left( Bs+C\right) }{s\left( s^{2}+4\right) } \\[ 5pt ]
&=&\frac {\left( A+B\right) s^{2}+Cs+4A }{s\left( s^{2}+4\right) } \\[ 5pt ]
\end{eqnarray}
\]
となるので,係数比較すれば,
\[
\begin{eqnarray}
A+B&=&0 \\[ 5pt ]
C&=&0 \\[ 5pt ]
4A&=&2 \\[ 5pt ]
\end{eqnarray}
\]
となるので,\( \ \displaystyle A=\frac {1}{2} \ \),\( \ \displaystyle B=-\frac {1}{2} \ \),\( \ C=0 \ \)となり,\( \ \displaystyle \frac {2}{s\left( s^{2}+4\right) }=\frac {1}{2}\cdot \frac {1}{s}-\frac {1}{2}\cdot \frac {s}{s^{2}+4} \ \)となる。したがって,\( \ Y(s) \ \)は,
\[
\begin{eqnarray}
Y(s)&=&\frac {1}{J}\left( \frac {1}{2}\cdot \frac {1}{s}-\frac {1}{2}\cdot \frac {s}{s^{2}+4}\right) \\[ 5pt ]
&=&\frac {1}{2J}\left( \frac {1}{s}-\frac {s}{s^{2}+4}\right) \\[ 5pt ]
\end{eqnarray}
\]
となるので,両辺ラプラス逆変換すると,
\[
\begin{eqnarray}
y(t)&=&\frac {1}{2J}\left( 1-\cos 2t\right) \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
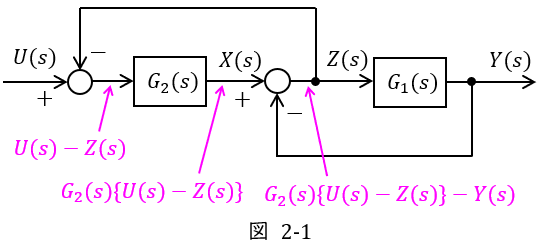
(2)入力\( \ U(s) \ \)から出力\( \ Y(s) \ \)までの伝達関数
図2の左から順番に各部の信号を考えると図2-1のようになるため,
\[
\begin{eqnarray}
Y(s)&=&G_{1}(s)\left[ G_{2}(s)\left\{ U(s) -Z(s)\right\}-Y(s) \right] \\[ 5pt ]
\end{eqnarray}
\]
となり,\( \ \displaystyle Z(s)=\frac {Y(s)}{G_{1}(s)} \ \)であることを利用して整理すると,
\[
\begin{eqnarray}
Y(s)&=&G_{1}(s)\left[ G_{2}(s)\left\{ U(s) -\frac {Y(s)}{G_{1}(s)}\right\}-Y(s) \right] \\[ 5pt ]
&=&G_{1}(s)\left\{ G_{2}(s)U(s) -\frac {G_{2}(s)Y(s)}{G_{1}(s)}-Y(s) \right\} \\[ 5pt ]
&=& G_{1}(s) G_{2}(s)U(s) -G_{2}(s)Y(s)-G_{1}(s)Y(s) \\[ 5pt ]
\left\{ 1+G_{1}(s)+G_{2}(s)\right\} Y(s)&=& G_{1}(s) G_{2}(s)U(s) \\[ 5pt ]
\frac {Y(s)}{U(s)}&=& \frac {G_{1}(s) G_{2}(s) }{1+G_{1}(s)+G_{2}(s)} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(3)閉ループ伝達関数の極をすべて\( \ -10 \ \)にするためのコントローラのパラメータ\( \ K_{1} \ \),\( \ K_{2} \ \)
(2)解答を用いて図3のブロック線図を書き換えると図3-1のようになる。図3-1より,伝達関数\( \ \displaystyle \frac {Y(s)}{R(s)} \ \)は,ワンポイント解説「2.ブロック線図の考え方」の通り,
\[
\begin{eqnarray}
\frac {Y(s)}{R(s)}&=& \frac {\displaystyle \frac {\left( K_{1}+K_{2}s\right)G_{1}(s) G_{2}(s) }{1+G_{1}(s)+G_{2}(s)}}{1+\displaystyle \frac {\left( K_{1}+K_{2}s\right)G_{1}(s) G_{2}(s) }{1+G_{1}(s)+G_{2}(s)}} \\[ 5pt ]
&=& \frac {\left( K_{1}+K_{2}s\right)G_{1}(s) G_{2}(s) }{1+G_{1}(s)+G_{2}(s)+\left( K_{1}+K_{2}s\right)G_{1}(s) G_{2}(s) } \\[ 5pt ]
\end{eqnarray}
\]
となり,\( \ \displaystyle G_{1}(s)=\frac {1}{s} \ \),\( \ \displaystyle G_{2}(s)=\frac {1}{2s} \ \)を代入して整理すると,
\[
\begin{eqnarray}
\frac {Y(s)}{R(s)}&=& \frac {\displaystyle \left( K_{1}+K_{2}s\right)\frac {1}{s} \cdot \frac {1}{2s} }{\displaystyle 1+\frac {1}{s}+\frac {1}{2s}+\left( K_{1}+K_{2}s\right)\frac {1}{s} \cdot \frac {1}{2s} } \\[ 5pt ]
&=& \frac {\displaystyle \frac {K_{1}+K_{2}s}{2s^{2}} }{\displaystyle 1+\frac {3}{2s}+\frac {K_{1}+K_{2}s}{2s^{2}} } \\[ 5pt ]
&=& \frac {K_{1}+K_{2}s }{\displaystyle 2s^{2}+3s+K_{1}+K_{2}s } \\[ 5pt ]
&=& \frac {K_{1}+K_{2}s }{\displaystyle 2s^{2}+\left( 3+K_{2}\right) s+K_{1} } \\[ 5pt ]
\end{eqnarray}
\]
となる。ここで,閉ループ伝達関数の極をすべて\( \ -10 \ \)にするためには,ワンポイント解説「3.伝達関数の極と零点」の通り,分母が\( \ 2s^{2}+\left( 3+K_{2}\right) s+K_{1}=2\left( s+10 \right) ^{2} \ \)と因数分解できなければならない。したがって,右辺を展開し係数比較すると,
\[
\begin{eqnarray}
2s^{2}+\left( 3+K_{2}\right) s+K_{1}&=& 2\left( s+10 \right) ^{2} \\[ 5pt ]
&=& 2\left( s^{2}+20s+100 \right) \\[ 5pt ]
&=& 2s^{2}+40s+200 \\[ 5pt ]
\end{eqnarray}
\]
となり,
\[
\begin{eqnarray}
3+K_{2}&=& 40 → K_{2}=37 \\[ 5pt ]
K_{1}&=& 200 \\[ 5pt ]
\end{eqnarray}
\]
と求められる。









 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】