Contents
【問題】
【難易度】★★★☆☆(普通)
電力系統には,過渡安定度と定態安定度の問題があり,系統特性や状況に応じて各種の安定化対策が導入される。この安定化技術について,次の問に答えよ。
(1) 下に示す機器や制御方式などの候補技術を次の\( \ \mathrm {A} \ \),\( \ \mathrm {B} \ \),\( \ \mathrm {C} \ \)の\( \ 3 \ \)種類に分類しなさい。
\( \ \mathrm {A}. \ \)過渡安定度と定態安定度の両方に有効な安定化対策技術
\( \ \mathrm {B}. \ \)過渡安定度対策のみに有効な安定化対策技術
\( \ \mathrm {C}. \ \)安定化対策としてはあまり効果を期待できない技術
候補技術:制動抵抗,\( \ \mathrm {PSS} \ \)付高速\( \ \mathrm {AVR} \ \),並列リアクトル,\( \ \mathrm {SVC} \ \),多導体方式,
タービン高速バルブ制御,高速度遮断,自動電圧調整器付変圧器,
直列コンデンサ,並列コンデンサ
(2) 上記(1)の\( \ \mathrm {A} \ \)に属す候補技術から二つ,\( \ \mathrm {B} \ \)に属す候補技術から二つ,計四つの技術を選び,それぞれの技術について,その概要と安定化の原理を簡潔に述べよ。
【ワンポイント解説】
過渡安定度と定態安定度に対する対策に関する問題です。
難易度が上がりすぎないよう候補技術を与えている反面,正答率を上げすぎないよう余分な候補を入れることで難易度を調整している印象です。
安定度は二次試験でも出題頻度が高い内容なので,必ず理解しておくようにして下さい。
1.同期発電機の出力
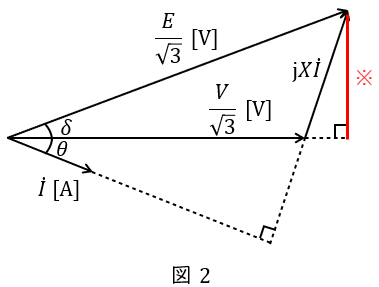
同期発電機の内部誘導起電力が\( \ E \ \mathrm {[V]} \ \),端子電圧が\( \ V \ \mathrm {[V]} \ \),\( \ 1 \ \)相あたりの同期リアクタンスが\( \ X \ \mathrm {[\Omega ]} \ \)(抵抗分は無視できるものとします),電機子電流が\( \ I \ \mathrm {[A]} \ \)であるとすると,回路図は図1,ベクトル図は図2のように描くことができます。ただし,\( \ \delta \ \mathrm {[rad]} \ \)は内部誘導起電力と端子電圧の相差角,\( \ \theta \ \mathrm {[rad]} \ \)は力率角です。
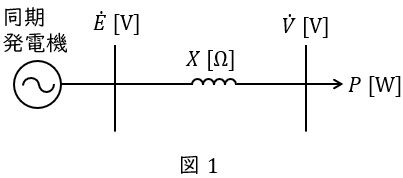
このとき,発電機の出力\( \ P \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P&=&\sqrt {3} VI\cos \theta \\[ 5pt ]
\end{eqnarray}
\]
で求めることができ,図2の※線を求める式より,
\[
\begin{eqnarray}
XI\cos \theta &=&\frac {E}{\sqrt {3}}\sin \delta \\[ 5pt ]
I\cos \theta &=&\frac {E}{\sqrt {3}X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
となるので,
\[
\begin{eqnarray}
P&=&\sqrt {3} VI\cos \theta \\[ 5pt ]
&=&\sqrt {3} V\cdot \frac {E}{\sqrt {3}X}\sin \delta \\[ 5pt ]
&=&\frac {EV}{X}\sin \delta \\[ 5pt ]
\end{eqnarray}
\]
となります。上式は\( \ P=\sqrt {3} VI\cos \theta \ \)と合わせて公式として覚えておきましょう。
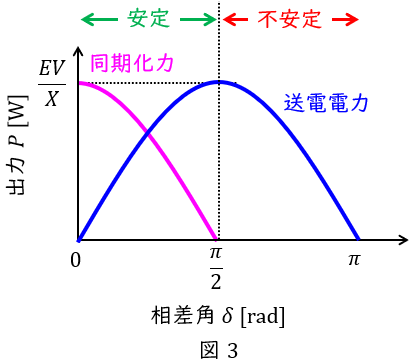
2.同期化力
同期発電機の同期外れの起こりにくさすなわち定態安定度を表す指標で,出力\( \ P \ \mathrm {[W]} \ \)を相差角\( \ \delta \ \mathrm {[rad]} \ \)で微分した\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta } \ \)で求められます。したがって,
\[
\begin{eqnarray}
\frac {\mathrm {d}P}{\mathrm {d}\delta }&=&\frac {EV}{X}\cos \delta \\[ 5pt ]
\end{eqnarray}
\]
となり,\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta }>0 \ \)のとき安定,\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta }<0 \ \)のとき不安定,すなわち\( \ \displaystyle 0 < \delta < \frac {\pi }{2} \ \)のとき安定,\( \ \displaystyle \frac {\pi }{2} < \delta < \pi \ \)のとき不安定となります。
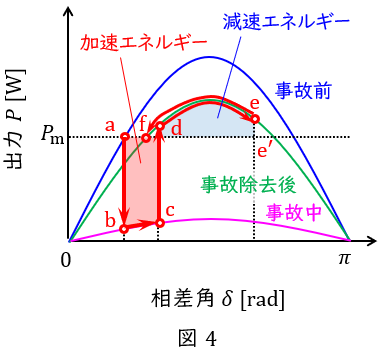
3.等面積法
過渡安定度のメカニズムの説明には,出力\( \ P \ \mathrm {[W]} \ \)と相差角\( \ \delta \ \mathrm {[rad]} \ \)の関係\( \ \left( \displaystyle P=\frac {EV}{X}\sin \delta \right) \ \)を表す図4のような\( \ P-\delta \ \)曲線による等面積法が用いられます。
図4の\( \ \mathrm {a} \ \)で安定運転していた発電機に事故が発生すると,多量の無効電力が流れ,\( \ \mathrm {b} \ \)点に移動します。事故を除去する\( \ \mathrm {c} \ \)点まで発電機は加速し,事故除去後,線路は一相分なくなる分事故前よりリアクタンスが大きくなるため,\( \ P-\delta \ \)曲線は緑線になり,\( \ \mathrm {d} \ \)点に移動します。その後,発電機は減速エネルギーが働き始め,\( \ \mathrm {e} \ \)点まで進むと減速を開始し,元の出力と同じ\( \ \mathrm {f} \ \)点まで行くと発電機は安定します。減速エネルギーが足りず,\( \ \mathrm {e}^{\prime } \ \)点まで行ってしまうと脱調します。
したがって,加速エネルギーを大きくしないためには,超速応励磁方式を採用し\( \ \mathrm {b} \ \)点から\( \ \mathrm {c} \ \)点までの距離を短くすることが効果的となります。
4.系統の安定度向上対策
系統の安定度向上対策には同期化力\( \ \displaystyle \frac {\mathrm {d}P}{\mathrm {d}\delta }=\frac {EV}{X}\cos \delta \ \)を高め定態安定度と過渡安定度の両方に有効なもの(①~④),事故発生時に即座に対応する過渡安定度に有効なもの(⑤~⑦)があります。
①\( \ \mathrm {PSS} \ \)付高速\( \ \mathrm {AVR} \ \)
電力安定化装置付高速自動電圧調整装置で,\( \ \mathrm {PSS} \ \)で電力動揺等の補助信号を\( \ \mathrm {AVR} \ \)に入力し,発電機電圧を高速に調整することで同期化力を高めます。
②\( \ \mathrm {SVC} \ \)
静止形無効電力補償装置で,サイリスタにより無効電力を調整でき,端子電圧\( \ V \ \)を一定に保つことで同期化力を高めます。
③多導体方式
電線の等価半径を大きくして,リアクタンス\( \ X \ \)を小さくし同期化力を高めます。
④直列コンデンサ
送電線に直列にコンデンサを挿入することで,リアクタンス\( \ X \ \)を小さくし同期化力を高めます。
⑤タービン高速バルブ制御
事故発生時に蒸気タービンの加減弁を高速に閉止してバイパスラインに蒸気を逃がすことで,機械的入力\( \ P_{\mathrm {m}} \ \)を減少させ,加速エネルギーの低下及び減速エネルギーの増加をさせます。
⑥制動抵抗
事故発生時に瞬時に発電機に接続し電力を消費させることで加速エネルギーを低下させます。
⑦高速度遮断・高速再閉路
高速度遮断は事故発生時に事故点を高速に遮断させることで加速エネルギーを減少させます。一方,高速再閉路は一過性の事故に対し瞬時に再閉路することで減速エネルギーを増加させます。
【解答】
(1)安定度向上に繋がる機器や制御方式などの候補技術を分類
(ポイント)
・ワンポイント解説「4.系統の安定度向上対策」の通りです。
・丸暗記するよりも,定態安定度と過渡安定度の原理を理解し,主に常時もしくは高速で対応できるもので分類すると判断しやすいかと思います。
(試験センター解答例)
\( \ \mathrm {A}. \ \)過渡安定度と定態安定度の両方に有効な安定化対策技術
\( \ \mathrm {PSS} \ \)付高速\( \ \mathrm {AVR} \ \),\( \ \mathrm {SVC} \ \),多導体方式,直列コンデンサ
\( \ \mathrm {B}. \ \)過渡安定度対策のみに有効な安定化対策技術
制動抵抗,タービン高速バルブ制御,高速度遮断
\( \ \mathrm {C}. \ \)安定化対策としてはあまり効果を期待できない技術
並列コンデンサ,並列リアクトル,自動電圧調整器付変圧器
(2)(1)の\( \ \mathrm {A} \ \)に属す候補技術から二つ,\( \ \mathrm {B} \ \)に属す候補技術から二つ,の技術について,その概要と安定化の原理
(ポイント)
・ワンポイント解説「4.系統の安定度向上対策」の通りです。
・「なぜ有効なのか」を説明できると高得点が得られるかと思います。
(試験センター解答例)
(\( \ \mathrm {A} \ \)に属す候補技術)
●\( \ \mathrm {PSS} \ \)付高速\( \ \mathrm {AVR} \ \):
〔概要〕
頂上電圧が高く応答の速い超速応励磁制御装置(高速\( \ \mathrm {AVR} \ \))に系統安定化のための系統安定化制御装置\( \ \left( \mathrm {PSS}\right) \ \)といわれる補助制御装置を付加した発電機の励磁制御装置である。
〔原理〕
高速\( \ \mathrm {AVR} \ \)により事故発生後の発電機端子電圧の低下が抑制され発電機の同期化力を強くする。これに加えて,\( \ \mathrm {PSS} \ \)は発電機の出力や回転速度,周波数などを制御入力信号とし,その位相の進み遅れを調整した制御信号を\( \ \mathrm {AVR} \ \)に入力し,主に発電機の制動力を強める。
●\( \ \mathrm {SVC} \ \):
〔概要〕
サイリスタ制御リアクトル(あるいは可飽和リアクトル)と電力用コンデンサを並列に接続し,無効電流の変化に対してサイリスタの制御(可飽和リアクトルの飽和特性)により,無効電流の変化に対し電圧の変化が小さくなる特性(\( \ \mathrm {d}V / \mathrm {d}I \ \)が小さくなる)を持たせる。
〔原理〕
これにより接続端子の電圧を一定に維持することが可能となり,発電機の同期化力を強めることができる。
●多導体方式:
〔概要〕
送電線において,複数個の素導体を適当なスペーサで束導体(多導体化)とすること。\( \ 2 \ \)導体,\( \ 4 \ \)導体,\( \ 6 \ \)導体,\( \ 8 \ \)導体などがある。
〔原理〕
これにより電線の等価半径を大きくでき,送電線の直列リアクタンスを小さくすることができるので,同期化力を強くすることができる。
●直列コンデンサ:
〔概要〕
送電線に直列にコンデンサを挿入する。故障電流による過電圧からコンデンサを保護するため,ギャップ付き避雷器や酸化亜鉛避雷器を設置する。なお,低周波軸ねじれ現象の発生防止に留意する必要がある。
〔原理〕
これにより送電線の合成リアクタンスを小さくすることができ,同期化力を強くすることができる。
(\( \ \mathrm {B} \ \)に属す候補技術)
●制動抵抗:
〔概要〕
発電機又は発電所の出力側に遮断器を通じて負荷抵抗を接続する。
〔原理〕
発電機の過渡安定度が失われるのは,送電線の短絡事故・地絡故障により電気出力が小さくなり発電機が加速するためである。発電機が加速中に制動抵抗をつないで発電機の電気出力を増加するようにし発電機の加速を抑制することができる。なお,効果的に用いるには投入時間を的確に選定する必要がある。
●タービン高速バルブ制御:
〔概要〕
汽力発電所のタービンの蒸気入口に高速で動作する蒸気加減弁を設置し,併せて,バイパス通路を設ける。
〔原理〕
系統での短絡・地絡故障発生後の発電機の加速を抑制するため機械入力(タービンへの入力エネルギー)を制限する。そのため,事故後速やかに,タービンへのバルブを急速に閉めると同時に,バイパス通路のバルブを開けて蒸気を逃がしてやる。
●高速度遮断:
〔概要〕
故障電流を高速に検出する保護リレーと高速動作の遮断器を送電線に設置する。
〔原理〕
高速度遮断は,送電線に故障が発生したときにできるだけ早く検出し,できるだけ早く遮断器を動作させ事故部を除去する方式である。これにより,より早く電圧を回復し電気出力を回復することができるので加速エネルギーを抑制し,相差角の変動を小さく抑えることができる。











 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】








 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは