Contents
【問題】
【難易度】★★★★☆(やや難しい)
図のフィードバック制御系について,次の問に答えよ。ただし,\( \ R\left( s\right) \ \),\( \ E\left( s\right) \ \),\( \ U\left( s\right) \ \),\( \ D\left( s\right) \ \)及び\( \ Y\left( s\right) \ \)は,目標値\( \ r\left( t\right) \ \),偏差\( \ e\left( t\right) \ \),制御入力\( \ u\left( t\right) \ \),外乱\( \ d\left( t\right) \ \)及び出力\( \ y\left( t\right) \ \)をそれぞれラプラス変換したものであり,\( \ C\left( s\right) \ \)は点線で囲んだ補償器内の補償要素の伝達関数を表す。
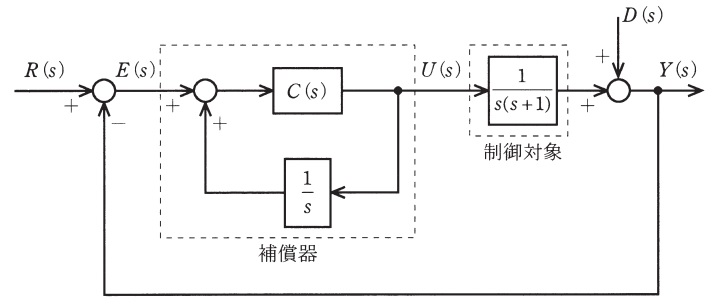
(1) \( \ D\left( s\right) =0 \ \)の場合,制御対象だけを取り出したとき,\( \ u\left( t\right) \ \)として単位ステップ応答を加えた時の出力応答\( \ y\left( t\right) \ \)を求めよ。
(2) 点線で囲んだ補償器だけを取り出したとき,\( \ E\left( s\right) \ \)から\( \ U\left( s\right) \ \)までの伝達関数を求めよ。
(3) 図のフィードバック制御系において,\( \ R\left( s\right) =0 \ \)のとき,\( \ D\left( s\right) \ \)から\( \ E\left( s\right) \ \)までの伝達関数を求めよ。
(4) \( \ R\left( s\right) =0 \ \)の場合,\( \ C\left( s\right) \ \)として,\( \ \displaystyle C\left( s\right) =\frac {s}{Ts+1} \ \)を選んだとき,外乱\( \ d\left( t\right) \ \)がランプ関数\( \ d\left( t\right) =t \ \left( t≧0\right) \ \)で与えられるときの定常速度偏差を求めよ。
(5) (4)の\( \ C\left( s\right) \ \)を選んだとき,外乱\( \ d\left( t\right) \ \)の影響が偏差\( \ e\left( t\right) \ \)に現れないようにするには,\( \ C\left( s\right) \ \)の時定数\( \ T \ \)をどのように選べばよいかを説明せよ。
(6) 点線で囲んだ補償器を\( \ \displaystyle K_{1}+\frac {K_{2}}{s} \ \)に置き換えたときのフィードバック制御系が安定となる条件を求めよ。
【ワンポイント解説】
フィードバック制御系からの出題で,1問1問はそれほど難しい内容ではありませんが,問題量が多く(6)にラウスの安定判別式を利用する必要があるため,やや難しめの問題となります。
電験\( \ 2 \ \)種のフィードバック制御系に関する問題は本問を理解していれば,ほとんどの問題が解けるようになると思います。
1.基本的なラプラス変換
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると以下のような関係があります。
\[
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
u (t) & \displaystyle \frac {1}{s} \\[ 5pt ]
K & \displaystyle \frac {K}{s} \\[ 5pt ]
t & \displaystyle \frac {1}{s^{2}} \\[ 5pt ]
\mathrm {e}^{at} & \displaystyle \frac {1}{s-a} \\[ 5pt ]
\sin \omega t & \displaystyle \frac {\omega }{s^{2}+\omega ^{2}} \\[ 5pt ]
\cos \omega t & \displaystyle \frac {s}{s^{2}+\omega ^{2}} \\[ 5pt ]
\hline
\end{array}
\]
2.ラウスの安定判別法
特性方程式\( \ a_{0}s^{n}+a_{1}s^{n-1}+a_{2}s^{n-2}+\cdots +a_{n-1}s+a_{n}=0 \ \)が与えられているとき,ラウスの数表は下表にように描くことができ,\( \ 1 \ \)列の値がすべて同符号であるとき,制御系は安定であると判別できます。
\[
\begin{array}{c|ccc}
& \color {red} {1 \ 列} & 2 \ 列 & 3 \ 列 \\
\hline
1 \ 行 & \color {red} {a_{0}} & a_{2} & a_{4} & \cdots \\
2 \ 行 & \color {red} {a_{1}} & a_{3} & a_{5} & \cdots \\
3 \ 行 & \color {red} {b_{1}=\frac {a_{1}a_{2}-a_{0}a_{3}}{a_{1}}} & b_{2}=\frac {a_{1}a_{4}-a_{0}a_{5}}{a_{1}} & \cdots \\
4 \ 行 & \color {red} {c_{1}=\frac {b_{1}a_{3}-a_{1}b_{2}}{b_{1}}} & c_{2}=\frac {b_{1}a_{5}-a_{1}b_{3}}{b_{1}} & \cdots \\
\vdots & \color {red} {\vdots } & \vdots &
\end{array}
\]
3.定常偏差(最終値の定理)
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると,\( \ f(t) \ \)の定常偏差は,
\[
\begin{eqnarray}
\displaystyle \lim _{ t \to \infty } f(t)&=&\displaystyle \lim _{ s \to 0 } sF(s) \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
【解答】
(1)\( \ D\left( s\right) =0 \ \)の場合,制御対象だけを取り出したとき,\( \ u\left( t\right) \ \)として単位ステップ応答を加えた時の出力応答\( \ y\left( t\right) \ \)
単位ステップ応答のラプラス変換\( \ U\left( s\right) \ \)は,ワンポイント解説「1.基本的なラプラス変換」より,
\[
\begin{eqnarray}
U\left( s\right) &=&\frac {1}{s} \\[ 5pt ]
\end{eqnarray}
\]
であるから,制御対象だけを取り出したとき\( \ Y\left( s\right) \ \)は,
\[
\begin{eqnarray}
Y\left( s\right) &=&\frac {1}{s\left( s+1\right) }U\left( s\right) \\[ 5pt ]
&=&\frac {1}{s\left( s+1\right) }\cdot \frac {1}{s} \\[ 5pt ]
&=&\frac {1}{s^{2}\left( s+1\right) } ・・・・・・・・・・・・・・・・・・・ ① \\[ 5pt ]
\end{eqnarray}
\]
となる。ここで,\( \ \displaystyle Y\left( s\right) =\frac {As+B}{s^{2}}+\frac {C}{s+1} \ \)とおくと,
\[
\begin{eqnarray}
Y\left( s\right) &=&\frac {As+B}{s^{2}}+\frac {C}{s+1} \\[ 5pt ]
&=&\frac {\left( As+B\right) \left( s+1\right) +Cs^{2}}{s^{2}\left( s+1\right) } \\[ 5pt ]
&=&\frac {\left( A+C\right) s^{2}+\left( A+B\right) s +B}{s^{2}\left( s+1\right) } \ ・・・・・・・・・ ② \\[ 5pt ]
\end{eqnarray}
\]
となるので,①及び②を比較すると,
\[
\begin{eqnarray}
A+C &=&0 \\[ 5pt ]
A+B &=&0 \\[ 5pt ]
B&=&1 \\[ 5pt ]
\end{eqnarray}
\]
となる。これらの関係式より,\( \ A=-1,B=1,C=1 \ \)と求められ,
\[
\begin{eqnarray}
Y\left( s\right) &=&\frac {-s+1}{s^{2}}+\frac {1}{s+1} \\[ 5pt ]
&=&\frac {1}{s^{2}}-\frac {1}{s}+\frac {1}{s+1} \\[ 5pt ]
\end{eqnarray}
\]
となり,これをラプラス逆変換すると,ワンポイント解説「1.基本的なラプラス変換」の通り,
\[
\begin{eqnarray}
y\left( t\right) &=&t-1+\mathrm {e}^{-t} \ \left( t≧0\right) \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)補償器だけを取り出したとき,\( \ E\left( s\right) \ \)から\( \ U\left( s\right) \ \)までの伝達関数
補償器の関係式は,
\[
\begin{eqnarray}
U\left( s\right) &=&\left\{ E\left( s\right) +\frac {1}{s}U\left( s\right) \right\} C\left( s\right) \\[ 5pt ]
\end{eqnarray}
\]
となるので,整理して伝達関数を求めると,
\[
\begin{eqnarray}
U\left( s\right) &=& E\left( s\right) C\left( s\right) +\frac {1}{s}U\left( s\right) C\left( s\right) \\[ 5pt ]
U\left( s\right) -\frac {1}{s}U\left( s\right) C\left( s\right) &=& E\left( s\right) C\left( s\right) \\[ 5pt ]
U\left( s\right) \left\{ 1-\frac {1}{s} C\left( s\right) \right\} &=& E\left( s\right) C\left( s\right) \\[ 5pt ]
\frac {U\left( s\right) }{E\left( s\right) } &=& \frac {C\left( s\right) }{\displaystyle 1-\frac {1}{s} C\left( s\right) } \\[ 5pt ]
&=& \frac {sC\left( s\right) }{\displaystyle s- C\left( s\right) } \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(3)\( \ R\left( s\right) =0 \ \)のとき,\( \ D\left( s\right) \ \)から\( \ E\left( s\right) \ \)までの伝達関数
(2)及びブロック線図より関係式は,
\[
\begin{eqnarray}
E\left( s\right) &=&-Y\left( s \right) & ・・・・・・・・・・ ③& \\[ 5pt ]
Y\left( s\right) &=&\frac {1}{s\left( s+1\right) }U\left( s \right) +D\left( s \right) & ・・・・・・・・・・ ④& \\[ 5pt ]
U\left( s\right) &=&\frac {sC\left( s\right) }{\displaystyle s- C\left( s\right) }E\left( s\right) & ・・・・・・・・・・ ⑤& \\[ 5pt ]
\end{eqnarray}
\]
となるので,⑤を④に代入すると,
\[
\begin{eqnarray}
Y\left( s\right) &=&\frac {1}{s\left( s+1\right) }\cdot \frac {sC\left( s\right) }{\displaystyle s- C\left( s\right) }E\left( s\right) +D\left( s \right) \\[ 5pt ]
&=& \frac {C\left( s\right) }{\displaystyle \left( s+1\right) \left\{ s- C\left( s\right) \right\} }E\left( s\right) +D\left( s \right) \\[ 5pt ]
\end{eqnarray}
\]
となり,これを③に代入し,伝達関数を求めると,
\[
\begin{eqnarray}
E\left( s\right) &=&-\left [\frac {C\left( s\right) }{\displaystyle \left( s+1\right) \left\{ s- C\left( s\right) \right\} }E\left( s\right) +D\left( s \right) \right] \\[ 5pt ]
E\left( s\right) +\frac {C\left( s\right) }{\displaystyle \left( s+1\right) \left\{ s- C\left( s\right) \right\} }E\left( s\right) &=&-D\left( s \right) \\[ 5pt ]
\left[ 1 +\frac {C\left( s\right) }{\displaystyle \left( s+1\right) \left\{ s- C\left( s\right) \right\} }\right] E\left( s\right) &=&-D\left( s \right) \\[ 5pt ]
\frac {\left( s+1\right) \left\{ s- C\left( s\right) \right\} +C\left( s\right) }{\displaystyle \left( s+1\right) \left\{ s- C\left( s\right) \right\} } E\left( s\right) &=&-D\left( s \right) \\[ 5pt ]
\frac {s^{2}+\left\{ 1-C\left( s\right) \right\} s }{\left( s+1\right) \left\{ s- C\left( s\right) \right\} } E\left( s\right) &=&-D\left( s \right) \\[ 5pt ]
\frac {E\left( s\right) }{D\left( s \right) }&=&-\frac {\left( s+1\right) \left\{ s- C\left( s\right) \right\} }{s\left\{ s+1-C\left( s\right) \right\} } \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(4)\( \ \displaystyle C\left( s\right) =\frac {s}{Ts+1} \ \)を選んだとき,外乱\( \ d\left( t\right) \ \)がランプ関数\( \ d\left( t\right) =t \ \)が与えられているときの定常速度偏差
(3)の解答式に\( \ \displaystyle C\left( s\right) =\frac {s}{Ts+1} \ \)を代入すると,
\[
\begin{eqnarray}
\frac {E\left( s\right) }{D\left( s \right) }&=&-\frac {\displaystyle \left( s+1\right) \left( s- \frac {s}{Ts+1} \right) }{\displaystyle s\left( s+1-\frac {s}{Ts+1} \right) } \\[ 5pt ]
\end{eqnarray}
\]
となり,分母分子に\( \ Ts+1 \ \)をかけると,
\[
\begin{eqnarray}
\frac {E\left( s\right) }{D\left( s \right) }&=&-\frac {\displaystyle \left( s+1\right) \left\{ s\left( Ts+1\right) – s \right\} }{\displaystyle s\left\{ \left( s+1\right) \left( Ts+1\right) -s \right\} } \\[ 5pt ]
&=&-\frac {\displaystyle Ts\left( s+1\right) }{Ts^{2}+Ts+1 } \\[ 5pt ]
\end{eqnarray}
\]
となる。ランプ関数のラプラス変換\( \ \displaystyle D\left( s \right) =\frac {1}{s^{2}} \ \)であるから,定常速度偏差は,ワンポイント解説「3.定常偏差(最終値の定理)」の通り,
\[
\begin{eqnarray}
\displaystyle \lim _{ t \to \infty } e(t)&=&\displaystyle \lim _{ s \to 0 } sE(s) \\[ 5pt ]
&=&\displaystyle \lim _{ s \to 0 } s\left\{ -\frac {\displaystyle Ts\left( s+1\right) }{\displaystyle Ts^{2}+Ts+1 }\right\}D(s) \\[ 5pt ]
&=&\displaystyle \lim _{ s \to 0 } s\left\{ -\frac {\displaystyle Ts\left( s+1\right) }{\displaystyle Ts^{2}+Ts+1 }\right\}\cdot \frac {1}{s^{2}} \\[ 5pt ]
&=&\displaystyle \lim _{ s \to 0 } \left\{ -\frac {\displaystyle T\left( s+1\right) }{\displaystyle Ts^{2}+Ts+1 }\right\} \\[ 5pt ]
&=&-T \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(5)外乱\( \ d\left( t\right) \ \)の影響が偏差\( \ e\left( t\right) \ \)に現れないようにするための時定数\( \ T \ \)
(4)より定常速度偏差が\( \ -T \ \)であるので,外乱の影響が出ないようにするためには時定数\( \ T \ \)をできるだけ小さくすれば良い。
(6)点線で囲んだ補償器を\( \ \displaystyle K_{1}+\frac {K_{2}}{s} \ \)に置き換えたときのフィードバック制御系が安定となる条件
\( \ \displaystyle K_{1}+\frac {K_{2}}{s} \ \)に置き換えたときの閉ループ伝達関数を求めると,
\[
\begin{eqnarray}
\left\{ R\left( s \right) -Y\left( s \right) \right\}\left( K_{1}+\frac {K_{2}}{s} \right)\frac {1}{s\left( s+1\right) } &=&Y\left( s\right) \\[ 5pt ]
\left( K_{1}+\frac {K_{2}}{s} \right)R\left( s \right) &=&\left\{ s\left( s+1\right) +\left( K_{1}+\frac {K_{2}}{s} \right)\right\} Y\left( s\right) \\[ 5pt ]
\frac {Y\left( s\right) }{R\left( s \right) }&=&\frac { \displaystyle K_{1}+\frac {K_{2}}{s}}{ \displaystyle s\left( s+1\right) +\left( K_{1}+\frac {K_{2}}{s} \right) } \\[ 5pt ]
&=&\frac { \displaystyle K_{1}s+K_{2}}{ \displaystyle s^{3}+s^{2}+K_{1}s+K_{2} } \\[ 5pt ]
\end{eqnarray}
\]
となる。これより,特性方程式は\( \ s^{3}+s^{2}+K_{1}s+K_{2}=0 \ \)で与えられるので,ワンポイント解説「2.ラウスの安定判別法」により,ラウスの数表を作成すると,
\[
\begin{array}{c|cc}
& 1列 & 2列 \\
\hline
1行 & 1 & K_{1} \\
2行 & 1 & K_{2} \\
3行 & K_{1}-K_{2} & 0 \\
4行 & K_{2} & \\
\end{array}
\]
となり,これより安定となる条件は,
\[
\begin{eqnarray}
K_{2}>0 \\[ 5pt ]
K_{1}-K_{2}>0 \\[ 5pt ]
\end{eqnarray}
\]
となるので,まとめると,
\[
\begin{eqnarray}
K_{1}>K_{2}>0 \\[ 5pt ]
\end{eqnarray}
\]
と求められる。










 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】








 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは