Contents
【問題】
【難易度】★★☆☆☆(やや易しい)
誘導電動機の回転速度\( \ n \ \mathrm {[{min}^{-1}]} \ \)は,次式で与えられる。
\( \ n=(1-s)n_{s} \ \) ここで,\( \ s \ \)は滑り,\( \ n_{s} \ \)は同期速度である。
したがって,滑り,同期速度を変えると回転速度\( \ n \ \)を変えることができ,具体的には一般に以下の方法がある。
\( \ \mathrm {a.} \ \)\( \ \fbox { (ア) } \ \)誘導電動機の\( \ \fbox { (イ) } \ \)回路の抵抗を変えて滑りを変化させる方法。この方法では\( \ \fbox { (イ) } \ \)回路の電力損失が大きい。
\( \ \mathrm {b.} \ \)電源の\( \ \fbox { (ウ) } \ \)を変化させる方法。電動機の電源側にインバータを設ける場合が多く,圧延機や工作機械等の広範囲な速度制御に用いられる。
\( \ \mathrm {c.} \ \)固定子の同じスロットに\( \ \fbox { (エ) } \ \)の異なる上下\( \ 2 \ \)種類の巻線を設けてこれを別々に利用したり,\( \ 1 \ \)組の固定子巻線の接続を変更したりなどして,\( \ \fbox { (エ) } \ \)を変え,回転速度を\( \ \fbox { (オ) } \ \)的に変える方法
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる語句として,正しいものを組み合わせたのは次のうちどれか。
\[
\begin{array}{cccccc}
& (ア) & (イ) & (ウ) & (エ) & (オ) \\
\hline
(1) & かご形 & 一 次 & 電 圧 & 相 数 & 連 続 \\
\hline
(2) & 巻線形 & 二 次 & 周波数 & 極 数 & 段 階 \\
\hline
(3) & かご形 & 一 次 & 周波数 & 相 数 & 段 階 \\
\hline
(4) & 巻線形 & 一 次 & 電 圧 & 極 数 & 段 階 \\
\hline
(5) & 巻線形 & 二 次 & 周波数 & 極 数 & 連 続 \\
\hline
\end{array}
\]
【ワンポイント解説】
誘導電動機の速度制御法に関する問題です。
専門書では各速度制御法に関して詳しく説明されていますが,電験での出題は本問程度でそこまで詳しい内容は問われません。
ある程度の概要の理解に努めるようにして下さい。
1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)及び同期角速度\( \ \omega _{\mathrm {s}} \ \)
三相誘導電動機の極数が\( \ p \ \),電源の周波数が\( \ f \ \mathrm {[Hz]} \ \)の時,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は,
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
\end{eqnarray}
\]
となります。また,同期角速度\( \ \omega _{\mathrm {s}} \ \mathrm {[rad / s]} \ \)は,
\[
\begin{eqnarray}
\omega _{\mathrm {s}} &=&\frac {2\pi N_{\mathrm {s}}}{60} \\[ 5pt ]
&=&\frac {2\pi }{60}\cdot \frac {120f}{p} \\[ 5pt ]
&=&\frac {4\pi f}{p} \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
2.誘導機の滑り\( \ s \ \)
誘導機の同期速度が\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \),回転速度が\( \ N \ \mathrm {[{min}^{-1}]} \ \)である時,誘導機の滑り\( \ s \ \)は,
\[
\begin{eqnarray}
s &=&\frac {N_{\mathrm {s}}-N}{N_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
となり,これを変形すると,
\[
\begin{eqnarray}
sN_{\mathrm {s}}&=&N_{\mathrm {s}}-N \\[ 5pt ]
N&=&N_{\mathrm {s}}-sN_{\mathrm {s}} \\[ 5pt ]
&=& N_{\mathrm {s}}\left( 1-s\right) \\[ 5pt ]
\end{eqnarray}
\]
となります。
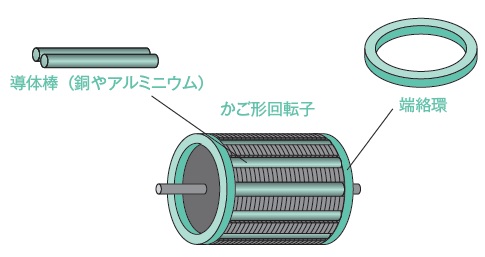
3.三相誘導電動機の回転子
①かご形
かごの形をした導体中に,透磁率の高い鉄心を入れ,両端を端絡環で接続したものです。
構造が簡単で,頑丈かつコンパクトである特徴があります。
出典:みんなが欲しかった!電験三種 機械の実践問題集P.65 TAC出版
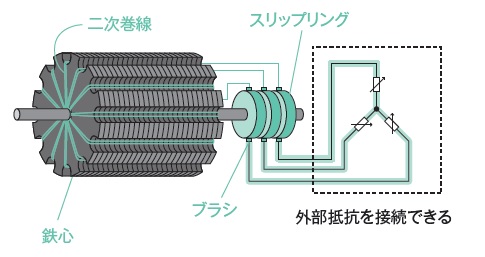
②巻線形
鉄心の外側のスロットに二次巻線を挿入した構造の回転子です。
二次巻線はスリップリングを介して外部の抵抗に接続できるという特徴があります。
出典:みんなが欲しかった!電験三種 機械の実践問題集P.65 TAC出版
4.誘導機の速度制御
誘導機の回転速度\( \ N \ \mathrm {[{min}^{-1}]} \ \)は,極数\( \ p \ \),電源の周波数\( \ f \ \mathrm {[Hz]} \ \),滑り\( \ s \ \)とすると,
\[
\begin{eqnarray}
N&=&\frac {120f}{p}\left( 1-s\right) \\[ 5pt ]
\end{eqnarray}
\]
となるため,以下の方法により速度制御することができます。
①極数制御
固定子巻線の接続を変更して極数\( \ p \ \)を変更する制御で,極数は\( \ 2 \ \)極,\( \ 4 \ \)極等の\( \ 2 \ \)の倍数の値しか取ることができないので段階的な制御となります。
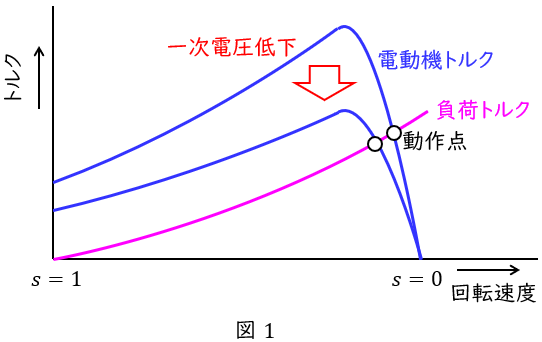
②一次電圧制御(\( \ s \ \)を制御)
図1に示すように一次電圧を制御することでトルクの特性を変え動作点を変えるもので,滑り\( \ s \ \)を制御し,回転速度を制御できます。
③一次周波数制御
固定子の周波数をインバータ等を用いて変更し回転速度を変化させます。誘導起電力は\( \ E=4.44kf\phi_{\mathrm {m}} \ \)の関係があるため,鉄心中の磁束を一定に保つため,電圧も下げる\( \ \mathrm {VVVF} \ \)制御と呼ばれる方法が一般的となります。
④二次抵抗制御(\( \ s \ \)を制御)
巻線形誘導機に使用される速度制御で,トルクの比例推移の原理により滑り\( \ s \ \)を制御し,回転速度を制御します。
⑤二次励磁制御(\( \ s \ \)を制御)
外部に可変滑り周波数の電圧を与えて回転速度を制御する方式で静止クレーマー方式,静止セルビウス方式等があります。
【解答】
解答:(2)
(ア)
ワンポイント解説「3.三相誘導電動機の回転子」及び「4.誘導機の速度制御」の通り,二次回路の抵抗を変えて滑りを変化させる方法は巻線形誘導電動機に採用可能な方法です。
(イ)
ワンポイント解説「3.三相誘導電動機の回転子」及び「4.誘導機の速度制御」の通り,巻線形誘導電動機では,二次回路の抵抗を変えて滑りを変化させることができます。
(ウ)
ワンポイント解説「4.誘導機の速度制御」の通り,電源側にインバータを設けて速度制御する方法には一次周波数制御があります。
(エ)
ワンポイント解説「4.誘導機の速度制御」の通り,極数を変更させることで回転速度を変化させることができます。
(オ)
ワンポイント解説「4.誘導機の速度制御」の通り,極数は\( \ 2 \ \)の倍数の値しか取ることができないので,段階的な制御となります。















 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは