Contents
【問題】
【難易度】★☆☆☆☆(易しい)
定格出力\( \ 22 \ \mathrm {kW} \ \),定格周波数\( \ 60 \ \mathrm {Hz} \ \),\( \ 6 \ \)極の三相かご形誘導電動機があり,定格回転速度が\( \ 1 \ 158 \ \mathrm {{min}^{-1}} \ \),定格運転時の効率が\( \ 87.5 \ % \ \)である。この誘導電動機に関して,次の問に答えよ。
ただし,負荷損は銅損のみとし,一次銅損と二次銅損は常に等しいものとする。また,機械損は無視する。
(1) 定格出力のときの滑り\( \ s_{1} \ [%] \ \)及び定格トルク\( \ T_{1} \ \mathrm {[N\cdot m]} \ \)をそれぞれ求めよ。
(2) 定格出力のときの二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)及び固定損\( \ P_{\mathrm {f}} \ \mathrm {[W]} \ \)をそれぞれ求めよ。
(3) 出力トルクが定格トルクの\( \ 50 \ % \ \)のときの回転速度\( \ N_{\mathrm {2}} \ \mathrm {[{min}^{-1}]} \ \)及び出力\( \ P_{\mathrm {2}} \ \mathrm {[W]} \ \)をそれぞれ求めよ。ただし,滑りとトルクが比例するものとする。
【ワンポイント解説】
三相かご形誘導電動機のトルクと滑りに関する計算問題です。
\( \ 3 \ \)種でも同レベルの問題が出題されるので,できれば選択し完答を目指したい問題です。
計算間違いに注意して確実に解いていくようにして下さい。
1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)と同期角速度\( \ \omega _{\mathrm {s}} \ \)
三相誘導電動機の極数が\( \ p \ \),電源の周波数が\( \ f \ \mathrm {[Hz]} \ \)の時,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は,
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
\end{eqnarray}
\]
となります。また,同期角速度\( \ \omega _{\mathrm {s}} \ \mathrm {[rad / s]} \ \)は,
\[
\begin{eqnarray}
\omega _{\mathrm {s}} &=&\frac {2\pi N_{\mathrm {s}}}{60} \\[ 5pt ]
&=&\frac {2\pi }{60}\cdot \frac {120f}{p} \\[ 5pt ]
&=&\frac {4\pi f}{p} \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
2.誘導機の滑り\( \ s \ \)
誘導機の同期速度が\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \),回転子の回転速度が\( \ N \ \mathrm {[{min}^{-1}]} \ \)である時,誘導機の滑り\( \ s \ \)は,
\[
\begin{eqnarray}
s &=&\frac {N_{\mathrm {s}}-N}{N_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
と定義されます。これを整理すると,
\[
\begin{eqnarray}
sN_{\mathrm {s}} &=&N_{\mathrm {s}}-N \\[ 5pt ]
N &=&N_{\mathrm {s}}-sN_{\mathrm {s}} \\[ 5pt ]
&=&\left( 1-s \right) N_{\mathrm {s}} \\[ 5pt ]
\end{eqnarray}
\]
と同期速度から回転速度が導出できます。
3.二次入力\( \ P_{2} \ \)と出力\( \ P_{\mathrm {o}} \ \)と二次銅損\( \ P_{\mathrm {c2}} \ \)の関係
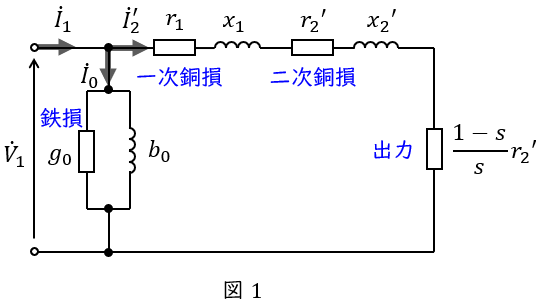
誘導電動機の\( \ \mathrm {L} \ \)形等価回路は図1のようになります。図1において,\( \ {\dot V}_{1} \ \mathrm {[V]} \ \)は一次側端子電圧(相電圧),\( \ {\dot I}_{1} \ \mathrm {[A]} \ \)は一次電流,\( \ {\dot I}_{2}^{\prime } \ \mathrm {[A]} \ \)は二次電流の一次換算,\( \ {\dot I}_{0} \ \mathrm {[A]} \ \)は励磁電流,\( \ r_{1} \ \mathrm {[\Omega ]} \ \)は一次巻線抵抗,\( \ r_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次巻線抵抗の一次換算,\( \ x_{1} \ \mathrm {[\Omega ]} \ \)は一次漏れリアクタンス,\( \ x_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次漏れリアクタンスの一次換算,\( \ s \ \)は滑りとなります。
図1より,出力\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \),二次入力\( \ P_{2} \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P_{\mathrm {o}} &=& 3\frac {1-s}{s}r_{2}^{\prime }{I_{2}^{\prime }}^{2} \\[ 5pt ]
P_{\mathrm {c2}} &=& 3r_{2}^{\prime }{I_{2}^{\prime }}^{2} \\[ 5pt ]
P_{2} &=& P_{\mathrm {o}}+P_{\mathrm {c2}} =3\frac {r_{2}^{\prime }}{s}{I_{2}^{\prime }}^{2} \\[ 5pt ]
\end{eqnarray}
\]
となり,誘導電動機の二次入力\( \ P_{2} \ \mathrm {[W]} \ \),出力\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)には,
\[
\begin{eqnarray}
P_{2}:P_{\mathrm {o}}:P_{\mathrm {c2}} &=& 1:(1-s):s \\[ 5pt ]
\end{eqnarray}
\]
の関係があることが分かります。
4.誘導電動機のトルク
図1より,二次電流の一次換算値の大きさ\( \ I_{2}^{\prime } \ \mathrm {[A]} \ \)は,
\[
\begin{eqnarray}
I_{2}^{\prime } &=& \frac {V_{1}}{\sqrt {\left( r_{1}+\displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}+\left( x_{1}+x_{2}^{\prime }\right) ^{2}}} \\[ 5pt ]
\end{eqnarray}
\]
であるため,三相誘導電動機のトルク\( \ T \ \mathrm {[N\cdot m]} \ \)は,
\[
\begin{eqnarray}
T&=&\frac {P_{\mathrm {o}}}{\omega } \\[ 5pt ]
&=&\frac {P_{2}\left( 1-s\right) }{\omega _{\mathrm {s}}\left( 1-s\right) } \\[ 5pt ]
&=&\frac {P_{2}}{\omega _{\mathrm {s}} } \\[ 5pt ]
&=&\frac {\displaystyle 3\frac {r_{2}^{\prime }}{s}{I_{2}^{\prime }}^{2}}{\omega _{\mathrm {s}} } \\[ 5pt ]
&=& \frac {1}{\omega _{\mathrm {s}}}\frac {3V_{1}^{2}\displaystyle \frac {r_{2}^{\prime }}{s}}{\left( r_{1}+\displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}+\left( x_{1}+x_{2}^{\prime }\right) ^{2}} \\[ 5pt ]
\end{eqnarray}
\]
となります。\( \ s≪1 \ \)であるとき,
\[
\begin{eqnarray}
T&≃&\frac {1}{\omega _{\mathrm {s}}}\frac {3V_{1}^{2}\displaystyle \frac {r_{2}^{\prime }}{s}}{\left( \displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}} \\[ 5pt ]
&=&\frac {3V_{1}^{2}}{r_{2}^{\prime }}s \\[ 5pt ]
\end{eqnarray}
\]
となります。
5.三相誘導電動機の効率\( \ \eta \ \)
三相誘導電動機の一次入力が\( \ P_{\mathrm {1}} \ \mathrm {[W]} \ \),二次入力が\( \ P_{\mathrm {2}} \ \mathrm {[W]} \ \),出力が\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),鉄損が\( \ P_{\mathrm {i}} \ \mathrm {[W]} \ \),一次銅損が\( \ P_{\mathrm {c1}} \ \mathrm {[W]} \ \),二次銅損が\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)であった時,各入力,出力の関係は,
\[
\begin{eqnarray}
P_{\mathrm {2}} &=&P_{\mathrm {1}}-P_{\mathrm {i}}-P_{\mathrm {c1}} \\[ 5pt ]
P_{\mathrm {o}} &=&P_{\mathrm {2}}-P_{\mathrm {c2}} \\[ 5pt ]
&=&P_{\mathrm {1}}-P_{\mathrm {i}}-P_{\mathrm {c1}}-P_{\mathrm {c2}} \\[ 5pt ]
\end{eqnarray}
\]
となるので,誘導電動機の効率\( \ \eta \ \mathrm {[%]} \ \)は,
\[
\begin{eqnarray}
\eta &=&\frac {P_{\mathrm {o}}}{P_{\mathrm {1}}}\times 100 \\[ 5pt ]
&=&\frac {P_{\mathrm {o}}}{P_{\mathrm {o}}+P_{\mathrm {i}}+P_{\mathrm {c1}}+P_{\mathrm {c2}}}\times 100 \\[ 5pt ]
\end{eqnarray}
\]
となります。
【解答】
(1)定格出力のときの滑り\( \ s_{1} \ [%] \ \)及び定格トルク\( \ T_{1} \ \mathrm {[N\cdot m]} \ \)
周波数\( \ f=60 \ \mathrm {[Hz]} \ \),極数\( \ p=6 \ \)なので,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は,ワンポイント解説「1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)」の通り,
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
&=&\frac {120\times 60}{6} \\[ 5pt ]
&=&1 \ 200 \ \mathrm {[{min}^{-1}]} \\[ 5pt ]
\end{eqnarray}
\]
となり,これと定格回転速度\( \ N_{1}=1 \ 158 \ \mathrm {[{min}^{-1}]} \ \)より,滑り\( \ s_{1} \ [%] \ \)は,ワンポイント解説「2.誘導機の滑り\( \ s \ \)」の通り,
\[
\begin{eqnarray}
s_{1} &=&\frac {N_{\mathrm {s}}-N_{1}}{N_{\mathrm {s}}} \\[ 5pt ]
&=&\frac {1 \ 200-1 \ 158}{1 \ 200} \\[ 5pt ]
&=&0.035 → 3.5 \ \mathrm {[%]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。また,定格運転時の同期速度\( \ \omega _{\mathrm {1}} \ \mathrm {[rad / s]} \ \)は,
\[
\begin{eqnarray}
\omega _{\mathrm {1}} &=&\frac {2\pi N_{1}}{60} \\[ 5pt ]
&=&\frac {2\pi \times 1 \ 158}{60} \\[ 5pt ]
&≒&121.27 \ \mathrm {[rad / s]} \\[ 5pt ]
\end{eqnarray}
\]
であり,これと定格出力\( \ P_{\mathrm {n}}=22 \ \mathrm {[kW]} \ \)より,定格トルク\( \ T_{1} \ \mathrm {[N\cdot m]} \ \)は,ワンポイント解説「4.誘導電動機のトルク」の通り,
\[
\begin{eqnarray}
T _{\mathrm {1}} &=&\frac {P_{\mathrm {n}}}{\omega _{\mathrm {1}}} \\[ 5pt ]
&=&\frac {22\times 10^{3}}{121.27} \\[ 5pt ]
&≒&181.41 → 181 \ \mathrm {[N\cdot m]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)定格出力のときの二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)及び固定損\( \ P_{\mathrm {f}} \ \mathrm {[W]} \ \)
出力と二次銅損の関係はワンポイント解説「3.二次入力\( \ P_{2} \ \)と出力\( \ P_{\mathrm {o}} \ \)と二次銅損\( \ P_{\mathrm {c2}} \ \)の関係」の通り,\( \ \left( 1-s_{1}\right) :s_{1} \ \)なので,二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P_{\mathrm {c2}} &=&\frac {s_{1}}{1-s_{1}}P_{\mathrm {n}} \\[ 5pt ]
&=&\frac {0.035}{1-0.035}\times 22\times 10^{3} \\[ 5pt ]
&≒&797.93 → 798 \ \mathrm {[W]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。また,一次銅損と二次銅損は等しいので,一次銅損\( \ P_{\mathrm {c1}}=P_{\mathrm {c2}}=797.93 \ \mathrm {[W]} \ \)となる。よって,定格運転時の効率\( \ \eta =0.875 \ \)であることから,固定損\( \ P_{\mathrm {f}} \ \mathrm {[W]} \ \)は,ワンポイント解説「5.三相誘導電動機の効率\( \ \eta \ \)」の通り,
\[
\begin{eqnarray}
\eta &=&\frac {P_{\mathrm {n}}}{P_{\mathrm {n}}+P_{\mathrm {f}}+P_{\mathrm {c1}}+P_{\mathrm {c2}}} \\[ 5pt ]
0.875 &=&\frac {22\times 10^{3}}{22\times 10^{3}+P_{\mathrm {f}}+797.93+797.93} \\[ 5pt ]
22\times 10^{3}+P_{\mathrm {f}}+797.93+797.93&=&\frac {22\times 10^{3}}{0.875} \\[ 5pt ]
P_{\mathrm {f}}+23 \ 596&≒&25 \ 143 \\[ 5pt ]
P_{\mathrm {f}}&=&1 \ 547 → 1 \ 550 \ \mathrm {[W]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(3)出力トルクが定格トルクの\( \ 50 \ % \ \)のときの回転速度\( \ N_{\mathrm {2}} \ \mathrm {[{min}^{-1}]} \ \)及び出力\( \ P_{\mathrm {2}} \ \mathrm {[W]} \ \)
トルクと滑りは比例するので,出力トルクが定格トルクの\( \ 50 \ % \ \),すなわち\( \ T_{2}=0.5T_{1} \ \mathrm {[N\cdot m]} \ \)のときの滑り\( \ s_{2} \ \)は,
\[
\begin{eqnarray}
s_{2} &=&0.5s_{1} \\[ 5pt ]
&=&0.5\times 0.035 \\[ 5pt ]
&=&0.017 \ 5 \\[ 5pt ]
\end{eqnarray}
\]
となるので,このときの回転速度\( \ N_{\mathrm {2}} \ \mathrm {[{min}^{-1}]} \ \)は,ワンポイント解説「2.誘導機の滑り\( \ s \ \)」の通り,
\[
\begin{eqnarray}
N_{\mathrm {2}} &=&N_{\mathrm {s}}\left( 1-s_{2}\right) \\[ 5pt ]
&=&1 \ 200\times \left( 1-0.017 \ 5\right) \\[ 5pt ]
&=&1 \ 179 → 1 \ 180 \ \mathrm {[{min}^{-1}]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。また,このときの出力\( \ P_{\mathrm {2}} \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P_{\mathrm {2}} &=&\omega _{\mathrm {2}}T_{2} \\[ 5pt ]
&=&\frac {2\pi N_{\mathrm {2}}}{60}\times 0.5T_{1} \\[ 5pt ]
&=&\frac {2\pi \times 1 \ 179}{60}\times 0.5\times 181.41 \\[ 5pt ]
&≒&11 \ 200 \ \mathrm {[W]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。








 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】








 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは