Contents
【問題】
【難易度】★★☆☆☆(やや易しい)
極数\( \ 4 \ \)で\( \ 50 \ \mathrm {[Hz]} \ \)用の巻線形三相誘導電動機があり,全負荷時の滑りは\( \ 4 \ \mathrm {[%]} \ \)である。 全負荷トルクのまま,この電動機の回転速度を\( \ 1 \ 200 \ \mathrm {[{min}^{-1}]} \ \)にするために,二次回路に挿入する\( \ 1 \ \)相当たりの抵抗\( \ \mathrm {[\Omega ]} \ \)の値として,最も近いのは次のうちどれか。
ただし,巻線形三相誘導電動機の二次巻線は星形\( \ \left( \mathrm {Y} \right) \ \)結線であり,各相の抵抗値は\( \ 0.5 \ \mathrm {[\Omega ]} \ \)とする。
(1) \( \ 2.0 \ \) (2) \( \ 2.5 \ \) (3) \( \ 3.0 \ \) (4) \( \ 7.0 \ \) (5) \( \ 7.5 \ \)
【ワンポイント解説】
巻線形三相誘導電動機のトルクの比例推移に関する問題です。
参考書によってはグラフを描いていたり難しく記載があったりするかもしれませんが,トルク一定のときに滑りと二次抵抗が比例するという公式を理解しておけば十分に解ける問題は多いので,最初は深く理解できなくても問題が解ければ大丈夫です。
1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)
三相誘導電動機の極数が\( \ p \ \),電源の周波数が\( \ f \ \mathrm {[Hz]} \ \)の時,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
\end{eqnarray}
\]
となります。
2.誘導機の滑り\( \ s \ \)
誘導機の同期速度が\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \),回転子の回転速度が\( \ N \ \mathrm {[{min}^{-1}]} \ \)である時,誘導機の滑り\( \ s \ \)は,
\[
\begin{eqnarray}
s &=&\frac {N_{\mathrm {s}}-N}{N_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
と定義されます。これを整理すると,
\[
\begin{eqnarray}
sN_{\mathrm {s}} &=&N_{\mathrm {s}}-N \\[ 5pt ]
N &=&N_{\mathrm {s}}-sN_{\mathrm {s}} \\[ 5pt ]
&=&\left( 1-s \right) N_{\mathrm {s}} \\[ 5pt ]
\end{eqnarray}
\]
と同期速度から回転速度が導出できます。
3.二次入力\( \ P_{2} \ \)と出力\( \ P_{\mathrm {o}} \ \)と二次銅損\( \ P_{\mathrm {c2}} \ \)の関係
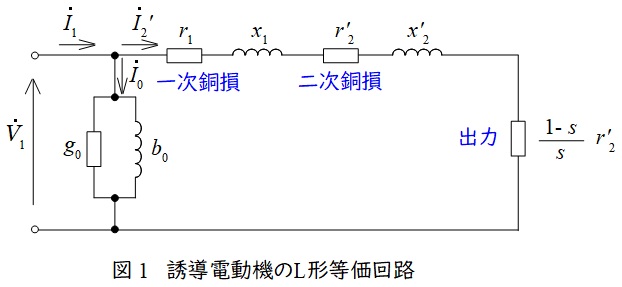
誘導電動機の\( \ \mathrm {L} \ \)形等価回路は図1のようになります。図1において,\( \ {\dot V}_{1} \ \mathrm {[V]} \ \)は一次側端子電圧,\( \ {\dot I}_{1} \ \mathrm {[A]} \ \)は一次電流,\( \ {\dot I}_{2}^{\prime } \ \mathrm {[A]} \ \)は二次電流の一次換算,\( \ {\dot I}_{0} \ \mathrm {[A]} \ \)は励磁電流,\( \ r_{1} \ \mathrm {[\Omega ]} \ \)は一次巻線抵抗,\( \ r_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次巻線抵抗の一次換算,\( \ x_{1} \ \mathrm {[\Omega ]} \ \)は一次漏れリアクタンス,\( \ x_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次漏れリアクタンスの一次換算,\( \ s \ \)は滑りとなります。
図1より,出力\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \),二次入力\( \ P_{2} \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P_{\mathrm {o}} &=& 3\frac {1-s}{s}r_{2}^{\prime }{I_{2}^{\prime }}^{2} \\[ 5pt ]
P_{\mathrm {c2}} &=& 3r_{2}^{\prime }{I_{2}^{\prime }}^{2} \\[ 5pt ]
P_{2} &=& P_{\mathrm {o}}+P_{\mathrm {c2}} =3\frac {r_{2}^{\prime }}{s}{I_{2}^{\prime }}^{2} \\[ 5pt ]
\end{eqnarray}
\]
となり,誘導電動機の二次入力\( \ P_{2} \ \mathrm {[W]} \ \),出力\( \ P_{\mathrm {o}} \ \mathrm {[W]} \ \),二次銅損\( \ P_{\mathrm {c2}} \ \mathrm {[W]} \ \)には,
\[
\begin{eqnarray}
P_{2}:P_{\mathrm {o}}:P_{\mathrm {c2}} &=& 1:(1-s):s \\[ 5pt ]
\end{eqnarray}
\]
の関係があることが分かります。
4.巻線形誘導電動機のトルクの比例推移
三相誘導電動機のトルク\( \ T \ \mathrm {[N\cdot m]} \ \)は,
\[
\begin{eqnarray}
T &=& \frac {1}{\omega _{\mathrm {s}}}\frac {3V_{1}^{2}\displaystyle \frac {r_{2}^{\prime }}{s}}{\left( r_{1}+\displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}+\left( x_{1}+x_{2}^{\prime }\right) ^{2}} \\[ 5pt ]
\end{eqnarray}
\]
であり,\( \ 1≫s \ \)の時,\( \ r_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)以外の抵抗やリアクタンスは無視できるので,
\[
\begin{eqnarray}
T &≃& \frac {3V_{1}^{2}s}{\omega _{\mathrm {s}}r_{2}^{\prime }} \\[ 5pt ]
\end{eqnarray}
\]
となり,トルクに対する変数は可変抵抗である二次抵抗\( \ r_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)と滑り\( \ s \ \)のみであり,トルク\( \ T \ \mathrm {[N\cdot m]} \ \)を一定とすると,
\[
\begin{eqnarray}
\frac {r_{2}^{\prime }}{s} &=& 一定 \\[ 5pt ]
\end{eqnarray}
\]
の関係があります。
【解答】
解答:(1)
題意より,極数\( \ p=4 \ \),周波数\( \ f=50 \ \mathrm {[Hz]} \ \)であるから,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は,ワンポイント解説「1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)」の通り,
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
&=&\frac {120\times 50}{4} \\[ 5pt ]
&=&1 \ 500 \ \mathrm {[{min}^{-1}]} \\[ 5pt ]
\end{eqnarray}
\]
となる。全負荷時の滑り\( \ s=0.04 \ \)であり,回転速度\( \ N=1 \ 200 \ \mathrm {[{min}^{-1}]} \ \)のときの滑り\( \ s^{\prime } \ \)が,ワンポイント解説「2.誘導機の滑り\( \ s \ \)」の通り,
\[
\begin{eqnarray}
s^{\prime } &=&\frac {N_{\mathrm {s}}-N}{N_{\mathrm {s}}} \\[ 5pt ]
&=&\frac {1 \ 500-1 \ 200}{1 \ 500} \\[ 5pt ]
&=&0.2 \\[ 5pt ]
\end{eqnarray}
\]
と計算され,各相の抵抗値\( \ r_{2}=0.5 \ \mathrm {[\Omega ]} \ \)であることから,二次回路に挿入する\( \ 1 \ \)相当たりの抵抗\( \ R \ \mathrm {[\Omega ]} \ \)は,ワンポイント解説「4.巻線形誘導電動機のトルクの比例推移」の通り,
\[
\begin{eqnarray}
\frac {r_{2}}{s} &=&\frac {r_{2}+R}{s^{\prime }} \\[ 5pt ]
\frac {0.5}{0.04} &=&\frac {0.5+R}{0.2} \\[ 5pt ]
\frac {0.5}{0.04}\times 0.2 &=&0.5+R \\[ 5pt ]
2.5&=&0.5+R \\[ 5pt ]
R&=&2.0 \ \mathrm {[\Omega ]} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。