Contents
【問題】
【難易度】★★★☆☆(普通)
誘導電動機を\( \ \mathrm {VVVF} \ \)(可変電圧可変周波数)インバータで駆動するものとする。このときの一般的な制御方式として\( \ \fbox { (ア) } \ \)が用いられる。いま,このインバータが\( \ 60 \ \mathrm {[Hz]} \ \)電動機用として,\( \ 60 \ \mathrm {[Hz]} \ \)のときに\( \ 100 \ \mathrm {[%]} \ \)電圧で運転するように調整されていたものとする。このインバータを用いて,\( \ 50 \ \mathrm {[Hz]} \ \)用電動機を\( \ 50 \ \mathrm {[Hz]} \ \)にて運転すると電圧は約\( \ \fbox { (イ) } \ \mathrm {[%]} \ \)となる。トルクは電圧のほぼ\( \ \fbox { (ウ) } \ \)に比例するので,この場合の最大発生トルクは,定格電圧印加時の最大発生トルクの約\( \ \fbox { (エ) } \ \mathrm {[%]} \ \)となる。
ただし,両電動機の定格電圧は同一である。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に当てはまる語句又は数値として,正しいものを組み合わせたのは次のうちどれか。
\[
\begin{array}{ccccc}
& (ア) & (イ) & (ウ) & (エ) \\
\hline
(1) & \displaystyle \frac {V}{f} \ 一定制御 & 83 & 2 \ 乗 & 69 \\
\hline
(2) & \displaystyle \frac {V}{f} \ 一定制御 & 83 & 3 \ 乗 & 57 \\
\hline
(3) & 電流一定制御 & 120 & 2 \ 乗 & 144 \\
\hline
(4) & 電圧位相制御 & 120 & 3 \ 乗 & 173 \\
\hline
(5) & 電圧位相制御 & 83 & 2 \ 乗 & 69 \\
\hline
\end{array}
\]
【ワンポイント解説】
周波数が変化したときの誘導電動機の特性の変化に関する問題です。
(イ)~(エ)を正確に理解するためには多くの知識を必要としますが,問題文で\( \ \mathrm {VVVF} \ \)(可変電圧可変周波数)インバータで駆動するとなっていることから(ア)の空欄が予想しやすいため,難易度の割には正答率は高かったと予想されます。
もちろん,すべての内容を理解するのが理想ですが,まずは概要理解に努めるようにして下さい。
1.三相誘導電動機の同期速度\( \ N_{\mathrm {s}} \ \)及び同期角速度\( \ \omega _{\mathrm {s}} \ \)
三相誘導電動機の極数が\( \ p \ \),電源の周波数が\( \ f \ \mathrm {[Hz]} \ \)の時,同期速度\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \)は,
\[
\begin{eqnarray}
N_{\mathrm {s}} &=&\frac {120f}{p} \\[ 5pt ]
\end{eqnarray}
\]
となります。また,同期角速度\( \ \omega _{\mathrm {s}} \ \mathrm {[rad / s]} \ \)は,
\[
\begin{eqnarray}
\omega _{\mathrm {s}} &=&\frac {2\pi N_{\mathrm {s}}}{60} \\[ 5pt ]
&=&\frac {2\pi }{60}\cdot \frac {120f}{p} \\[ 5pt ]
&=&\frac {4\pi f}{p} \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
2.誘導機の滑り\( \ s \ \)
誘導機の同期速度が\( \ N_{\mathrm {s}} \ \mathrm {[{min}^{-1}]} \ \),回転子の回転速度が\( \ N \ \mathrm {[{min}^{-1}]} \ \)である時,誘導機の滑り\( \ s \ \)は,
\[
\begin{eqnarray}
s &=&\frac {N_{\mathrm {s}}-N}{N_{\mathrm {s}}} \\[ 5pt ]
\end{eqnarray}
\]
と定義されます。これを整理すると,
\[
\begin{eqnarray}
sN_{\mathrm {s}} &=&N_{\mathrm {s}}-N \\[ 5pt ]
N &=&N_{\mathrm {s}}-sN_{\mathrm {s}} \\[ 5pt ]
&=&\left( 1-s \right) N_{\mathrm {s}} \\[ 5pt ]
\end{eqnarray}
\]
と同期速度から回転速度が導出できます。
3.\( \ V / f \ \)一定制御
電動機の回転速度を周波数で制御する際に,電動機の磁束が飽和しないように\( \ \displaystyle \frac {V}{f} \ \)を一定とする制御です。
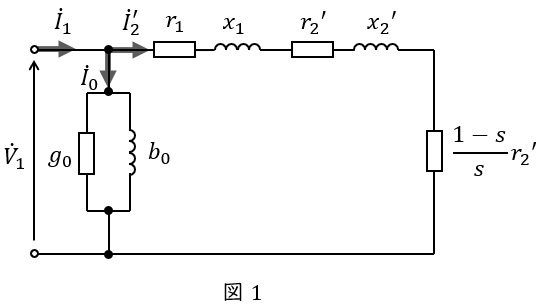
ここでは図1に示すような誘導電動機の\( \ \mathrm {L} \ \)形等価回路を用いて説明します。ただし,図1において,\( \ {\dot V}_{1} \ \mathrm {[V]} \ \)は一次側端子電圧,\( \ {\dot I}_{1} \ \mathrm {[A]} \ \)は一次電流,\( \ {\dot I}_{2}^{\prime } \ \mathrm {[A]} \ \)は二次電流の一次換算,\( \ {\dot I}_{0} \ \mathrm {[A]} \ \)は励磁電流,\( \ r_{1} \ \mathrm {[\Omega ]} \ \)は一次巻線抵抗,\( \ r_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次巻線抵抗の一次換算,\( \ x_{1} \ \mathrm {[\Omega ]} \ \)は一次漏れリアクタンス,\( \ x_{2}^{\prime } \ \mathrm {[\Omega ]} \ \)は二次漏れリアクタンスの一次換算,\( \ g_{0} \ \mathrm {[S]} \ \)は励磁コンダクタンス,\( \ b_{0} \ \mathrm {[S]} \ \)は励磁サセプタンス,\( \ s \ \)は滑りとなります。
界磁磁束\( \ \mathit {\Phi } \ \mathrm {[Wb]} \ \)は励磁電流\( \ I_{0} \ \mathrm {[A]} \ \)に比例し,図1において,励磁電流\( \ I_{0} \ \mathrm {[A]} \ \)は\( \ g_{0} \ \mathrm {[S]} \ \)が小さいとすると\( \ b_{0} \ \mathrm {[S]} \ \)にほぼ比例します。
\( \ \displaystyle b_{0}=\frac {1}{2\pi fL} \ \)であり,\( \ b_{0} \ \mathrm {[S]} \ \)は周波数\( \ f \ \mathrm {[Hz]} \ \)に反比例するので,磁束\( \ \mathit {\Phi } \ \mathrm {[Wb]} \ \)は周波数\( \ f \ \mathrm {[Hz]} \ \)にほぼ反比例することがわかります。
また,図1の等価回路において,オームの法則より励磁電流\( \ I_{0} \ \mathrm {[A]} \ \)は\( \ V_{1} \ \mathrm {[V]} \)に比例するので,磁束\( \ \mathit {\Phi } \ \mathrm {[Wb]} \ \)は\( \ \displaystyle \frac {V}{f} \ \)にほぼ比例することが分かります。
したがって,磁束を飽和させないためには周波数を変動させると同時に電圧を変化させる必要があることがわかります。
4.誘導電動機のトルク
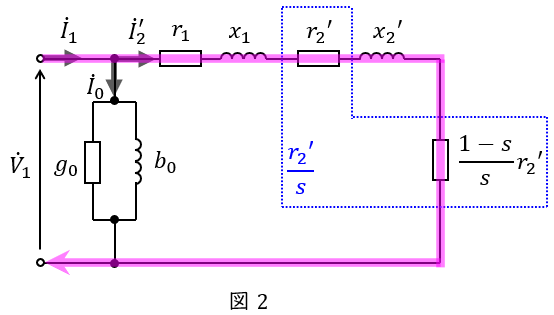
図2に示す\( \ \mathrm {L} \ \)形等価回路の閉回路にキルヒホッフの法則を適用すると,二次電流の一次換算\( \ I_{2}^{\prime } \ \mathrm {[A]} \ \)は,
\[
\begin{eqnarray}
I_{2}^{\prime } &=& \frac {V_{1}}{\sqrt {\left( r_{1}+\displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}+\left( x_{1}+x_{2}^{\prime }\right) ^{2}}} \\[ 5pt ]
\end{eqnarray}
\]
となるので,二次入力\( \ P_{2} \ \mathrm {[W]} \ \)は,
\[
\begin{eqnarray}
P_{2} &=& 3\frac {r_{2}^{\prime }}{s}{I_{2}^{\prime }}^{2} \\[ 5pt ]
&=& \frac {3{V_{1}}^{2}\displaystyle \frac {r_{2}^{\prime }}{s}}{\left( r_{1}+\displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}+\left( x_{1}+x_{2}^{\prime }\right) ^{2}} \\[ 5pt ]
\end{eqnarray}
\]
となります。したがって,三相誘導電動機のトルク\( \ T \ \mathrm {[N\cdot m]} \ \)は,同期角速度を\( \ \omega _{\mathrm {s}} \ \mathrm {[rad / s]} \ \)とすると,
\[
\begin{eqnarray}
T &=& \frac {P_{\mathrm {o}}}{\omega } \\[ 5pt ]
&=& \frac {P_{\mathrm {2}}\left( 1-s\right) }{\omega _{\mathrm {s}} \left( 1-s\right) } \\[ 5pt ]
&=& \frac {P_{\mathrm {2}} }{\omega _{\mathrm {s}} } \\[ 5pt ]
&=& \frac {1}{\omega _{\mathrm {s}}}\frac {3{V_{1}}^{2}\displaystyle \frac {r_{2}^{\prime }}{s}}{\left( r_{1}+\displaystyle \frac {r_{2}^{\prime }}{s}\right) ^{2}+\left( x_{1}+x_{2}^{\prime }\right) ^{2}} \\[ 5pt ]
\end{eqnarray}
\]
と求められます。
【解答】
解答:(1)
(ア)
ワンポイント解説「3.\( \ V / f \ \)一定制御」の通り,\( \ \mathrm {VVVF} \ \)(可変電圧可変周波数)インバータでは,電動機の磁束が飽和しないように\( \ \displaystyle \frac {V}{f} \ \)一定制御が用いられます。
(イ)
ワンポイント解説「3.\( \ V / f \ \)一定制御」の通り,電圧は周波数に比例して下げていくので,\( \ 50 \ \mathrm {Hz} \ \)の時の電圧は\( \ \displaystyle \frac {50}{60}≒0.833 → 83 \ \mathrm {[%]} \ \)となります。
(ウ)
ワンポイント解説「4.誘導電動機のトルク」の通り,トルクは電圧のほぼ\( \ 2 \ \)乗に比例します。
(エ)
ワンポイント解説「4.誘導電動機のトルク」の通り,トルクは電圧の\( \ 2 \ \)乗に比例するので,\( \ 50 \ \mathrm {Hz} \ \)の時のトルクは\( \ \displaystyle \left( \frac {50}{60}\right) ^{2}≒0.694 → 69 \ \mathrm {[%]} \ \)となります。