【問題】
【難易度】★★☆☆☆(やや易しい)
次の文章は,図のような閉ループ制御系に関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる語句,式又は数値を解答群の中から選び,その記号をマークシートに記入しなさい。
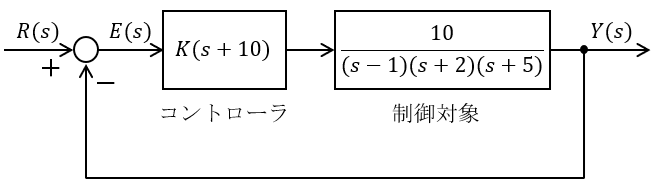
図のブロック線図で,\( \ R(s) \ \)は目標値,\( \ Y(s) \ \)は制御量,\( \ E(s) \ \)は偏差を表す。この制御系の制御対象自体は\( \ \fbox { (1) } \ \)系であるが,コントローラのゲイン\( \ K \ \)を\( \ \fbox { (2) } \ \lt K \lt \ \fbox { (3) } \ \)の範囲に選ぶことにより,閉ループ伝達関数のすべての極を\( \ s \ \)平面の左半面に移すことができる。この\( \ K \ \)の範囲では,単位ステップ関数状の目標値\( \ R(s) \ \)に対して,制御系の定常位置偏差は\( \ \fbox { (4) } \ \)となる。また,\( \ K= \ \fbox { (3) } \ \)のときには,角周波数が\( \ \fbox { (5) } \ \mathrm {[rad / s]} \ \)の持続振動が生じる。
〔問4の解答群〕
\[
\begin{eqnarray}
&(イ)& \sqrt {10} &(ロ)& 漸近安定 &(ハ)& \frac {1}{1-10K} \\[ 5pt ]
&(ニ)& 7 &(ホ)& 6 &(ヘ)& \frac {1}{1+10K} \\[ 5pt ]
&(ト)& 1 &(チ)& 0.7 &(リ)& 安 定 \\[ 5pt ]
&(ヌ)& 2.8 &(ル)& \sqrt {60} &(ヲ)& 不安定 \\[ 5pt ]
&(ワ)& \frac {1}{10\left( K+1\right) } &(カ)& \sqrt {6} &(ヨ)& 0.1 \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
閉ループ制御系の安定判別に関する問題です。
少し計算量は一次試験としては多めではありますが,\( \ 2 \ \)種の二次試験でも定番となっていたような内容であるため,できれば多く正答しておきたい問題となります。
ラプラス変換やラウスの安定判別法は必ず覚えておくようにしましょう。
1.基本的なラプラス変換
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると以下のような関係があります。
\[
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
{\displaystyle \delta (t) }\atop{単位インパルス関数} & 1 \\[ 5pt ]
{\displaystyle u (t) }\atop{単位ステップ関数} & \displaystyle \frac {1}{s} \\[ 5pt ]
K & \displaystyle \frac {K}{s} \\[ 5pt ]
t & \displaystyle \frac {1}{s^{2}} \\[ 5pt ]
\mathrm {e}^{at} & \displaystyle \frac {1}{s-a} \\[ 5pt ]
\sin \omega t & \displaystyle \frac {\omega }{s^{2}+\omega ^{2}} \\[ 5pt ]
\cos \omega t & \displaystyle \frac {s}{s^{2}+\omega ^{2}} \\[ 5pt ]
\displaystyle \frac {\mathrm {d}f\left( t \right) }{\mathrm {d}t} & sF\left( s \right) -f\left( 0 \right) \\[ 5pt ]
\displaystyle \int f\left( t \right) \mathrm {d}t & \displaystyle \frac {F\left( s \right) }{s}+\frac {1}{s}\int _{-\infty }^{0}f\left( \tau \right) \mathrm {d}\tau \\[ 5pt ]
\hline
\end{array}
\]
2.ブロック線図の考え方
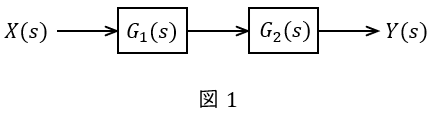
①直列
図1のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
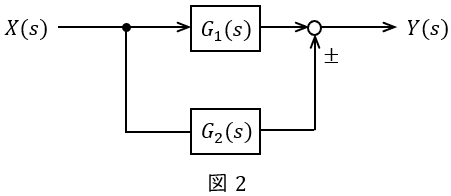
②並列
図2のような伝達関数\( \ G_{1}(s) \ \),\( \ G_{2}(s) \ \)が与えられているとき,全体の伝達関数\( \ G(s) \ \)は,
\[
\begin{eqnarray}
G(s)&=&\frac {Y(s)}{X(s)}=G_{1}(s)±G_{2}(s) \\[ 5pt ]
\end{eqnarray}
\]
となります。
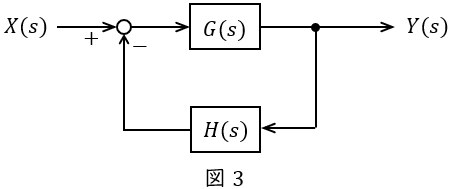
③フィードバック
図3のような\( \ G(s) \ \),\( \ H(s) \ \)が与えられているとき,全体の伝達関数\( \ W(s) \ \)は,
\[
\begin{eqnarray}
Y(s)&=&\left\{ X(s) -H(s)Y(s) \right\} G(s) \\[ 5pt ]
Y(s)&=&G(s)X(s) -G(s)H(s)Y(s) \\[ 5pt ]
Y(s)+G(s)H(s)Y(s) &=&G(s)X(s) \\[ 5pt ]
\left\{ 1+G(s)H(s)\right\} Y(s) &=&G(s)X(s) \\[ 5pt ]
\frac {Y(s)}{X(s)}&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
W(s)&=&\frac {G(s)}{1+G(s)H(s)} \\[ 5pt ]
\end{eqnarray}
\]
となります。
3.ラウスの安定判別法
特性方程式\( \ a_{0}s^{n}+a_{1}s^{n-1}+a_{2}s^{n-2}+\cdots +a_{n-1}s+a_{n}=0 \ \)が与えられているとき,ラウスの数表は下表にように描くことができ,\( \ 1 \ \)列の値がすべて同符号であるとき,制御系は安定であると判別できます。
\[
\begin{array}{c|ccc}
& \color {red} {1 \ 列} & 2 \ 列 & 3 \ 列 \\
\hline
1 \ 行 & \color {red} {a_{0}} & a_{2} & a_{4} & \cdots \\
2 \ 行 & \color {red} {a_{1}} & a_{3} & a_{5} & \cdots \\
3 \ 行 & \color {red} {b_{1}=\frac {a_{1}a_{2}-a_{0}a_{3}}{a_{1}}} & b_{2}=\frac {a_{1}a_{4}-a_{0}a_{5}}{a_{1}} & \cdots \\
4 \ 行 & \color {red} {c_{1}=\frac {b_{1}a_{3}-a_{1}b_{2}}{b_{1}}} & c_{2}=\frac {b_{1}a_{5}-a_{1}b_{3}}{b_{1}} & \cdots \\
\vdots & \color {red} {\vdots } & \vdots &
\end{array}
\]
4.最終値の定理
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると,\( \ f(t) \ \)の定常値は,
\[
\begin{eqnarray}
\displaystyle \lim _{ t \to \infty } f(t)&=&\displaystyle \lim _{ s \to 0 } sF(s) \\[ 5pt ]
\end{eqnarray}
\]
で求められます。
【解答】
(1)解答:ヲ
題意より解答候補は,(ロ)漸近安定,(リ)安定,(ヲ)不安定,になると思います。
制御対象の特性方程式は\( \ \left( s-1\right) \left( s+2\right) \left( s+5\right) =0 \ \)となり,特性根は\( \ s=1 , -2,-5 \ \)となります。正の根がある(極に\( \ s \ \)平面の右半面のものがある)ので不安定となります。
※特性方程式を展開して,\( \ s^{3}+6s^{2}+3s-10 =0 \ \)として,\( \ -10 \ \)が含まれるので不安定と判定することも可能です。
(2)解答:ヨ
問題図における\( \ R(s) \ \)から\( \ Y(s) \ \)までの伝達関数\( \ W(s) \ \)は,ワンポイント解説「2.ブロック線図の考え方」の通り,
\[
\begin{eqnarray}
W(s) &=& \frac {\displaystyle K\left( s+10\right) \cdot \frac {10}{\left( s-1\right) \left( s+2\right) \left( s+5\right) }}{\displaystyle 1+K\left( s+10\right) \cdot \frac {10}{\left( s-1\right) \left( s+2\right) \left( s+5\right) }} \\[ 5pt ]
&=& \frac {\displaystyle \frac {10K\left( s+10\right)}{\left( s-1\right) \left( s+2\right) \left( s+5\right) }}{\displaystyle \frac {\left( s-1\right) \left( s+2\right) \left( s+5\right) +10K\left( s+10\right) }{\left( s-1\right) \left( s+2\right) \left( s+5\right) }} \\[ 5pt ]
&=& \frac {10K\left( s+10\right)}{\left( s-1\right) \left( s+2\right) \left( s+5\right) +10K\left( s+10\right) } \\[ 5pt ]
&=& \frac {10K\left( s+10\right)}{s^{3}+6s^{2}+3s-10 +10Ks+100K } \\[ 5pt ]
&=& \frac {10K\left( s+10\right)}{s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10 } \\[ 5pt ]
\end{eqnarray}
\]
となり,特性方程式は\( \ s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10=0 \ \)なるので,ラウス表を作成すると,ワンポイント解説「3.ラウスの安定判別法」の通り,
\[
\begin{array}{c|cc}
& 1 \ 列 & 2 \ 列 \\
\hline
1 \ 行 & 1 & 10K+3 \\
2 \ 行 & 6 & 100K-10 \\
3 \ 行 & \frac {6\left( 10K+3\right)-\left( 100K-10\right)}{6}=\frac {-40K+28}{6} & \\
4 \ 行 & 100K-10 & \\
\end{array}
\]
となり,安定となるための\( \ K \ \)は,
\[
\begin{eqnarray}
\frac {-40K+28}{6} &\gt& 0 \\[ 5pt ]
-40K+28 &\gt& 0 \\[ 5pt ]
40K &\lt& 28 \\[ 5pt ]
K &\lt& 0.7 \\[ 5pt ]
100K-10 &\gt& 0 \\[ 5pt ]
100K &\gt& 10 \\[ 5pt ]
K &\gt& 0.1 \\[ 5pt ]
\end{eqnarray}
\]
となるので,(2)に当てはまるのは\( \ 0.1 \ \)と求められる。
(3)解答:チ
(2)解答式より,(3)に当てはまるのは\( \ 0.7 \ \)と求められる。
(4)解答:ハ
\( \ R(s) \ \)から\( \ E(s) \ \)までの関係式は,
\[
\begin{eqnarray}
R(s)-K\left( s+10\right) \cdot \frac {10}{\left( s-1\right) \left( s+2\right) \left( s+5\right) }E(s) &=&E(s) \\[ 5pt ]
R(s) &=&E(s)+ \frac {10K\left( s+10\right) }{\left( s-1\right) \left( s+2\right) \left( s+5\right) }E(s) \\[ 5pt ]
&=& \frac {\left( s-1\right) \left( s+2\right) \left( s+5\right) +10K\left( s+10\right) }{\left( s-1\right) \left( s+2\right) \left( s+5\right) }E(s) \\[ 5pt ]
&=& \frac {s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10 }{\left( s-1\right) \left( s+2\right) \left( s+5\right) }E(s) \\[ 5pt ]
E(s)&=& \frac {\left( s-1\right) \left( s+2\right) \left( s+5\right) }{s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10 }R(s) \\[ 5pt ]
\end{eqnarray}
\]
となり,単位ステップ関数のラプラス変換は\( \ \displaystyle \frac {1}{s} \ \)であるから,制御系の定常位置偏差は,ワンポイント解説「4.最終値の定理」の通り,
\[
\begin{eqnarray}
\displaystyle \lim _{ s \to 0 } sE(s)&=&\displaystyle \lim _{ s \to 0 } s\cdot \frac {\left( s-1\right) \left( s+2\right) \left( s+5\right) }{s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10 }\cdot \frac {1}{s} \\[ 5pt ]
&=&\displaystyle \lim _{ s \to 0 } \frac {\left( s-1\right) \left( s+2\right) \left( s+5\right) }{s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10 } \\[ 5pt ]
&=& \frac {\left( -1\right) \times 2 \times 5 }{100K-10 } \\[ 5pt ]
&=& \frac {1}{1-10K} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(5)解答:イ
\( \ K=0.7 \ \)のとき特性方程式は,
\[
\begin{eqnarray}
s^{3}+6s^{2}+\left( 10K+3\right) s +100K-10 &=& 0 \\[ 5pt ]
s^{3}+6s^{2}+\left( 10\times 0.7+3\right) s +100\times 0.7-10 &=& 0 \\[ 5pt ]
s^{3}+6s^{2}+10 s +60 &=& 0 \\[ 5pt ]
\end{eqnarray}
\]
となり,持続振動が生じているとき,特性方程式の実部が零(ラプラス逆変換したときに指数部分が零となり増幅度が\( \ 1 \ \)となるため)すなわち根は純虚数\( \ s = j\omega \ \)となるため,これを上式に代入し角周波数\( \ \omega \ \mathrm {[rad / s]} \ \)を求めると,
\[
\begin{eqnarray}
-j \omega ^{3}-6\omega ^{2}+j10 \omega +60 &=& 0 \\[ 5pt ]
-6\left( \omega ^{2}-10 \right) -j\omega \left( \omega ^{2} -10\right) &=& 0 \\[ 5pt ]
6\left( \omega ^{2}-10 \right) +j\omega \left( \omega ^{2} -10\right) &=& 0 \\[ 5pt ]
\left( 6 +j\omega \right) \left( \omega ^{2} -10\right) &=& 0 \\[ 5pt ]
\left( 6 +j\omega \right) \left( \omega +\sqrt {10}\right) \left( \omega -\sqrt {10}\right) &=& 0 \\[ 5pt ]
\omega &=& \sqrt {10} \ \mathrm {[rad / s]} \left( ∵\omega \gt 0\right)\\[ 5pt ]
\end{eqnarray}
\]
と求められる。


















 愛知県出身 愛称たけちゃん
愛知県出身 愛称たけちゃん