Contents
【問題】
【難易度】★★★★☆(やや難しい)
次の文章は,フランシス水車で用いられる電気式調速機に関する記述である。文中の\( \ \fbox{$\hskip3em\Rule{0pt}{0.8em}{0em}$} \ \)に当てはまる最も適切なものを解答群の中から選べ。
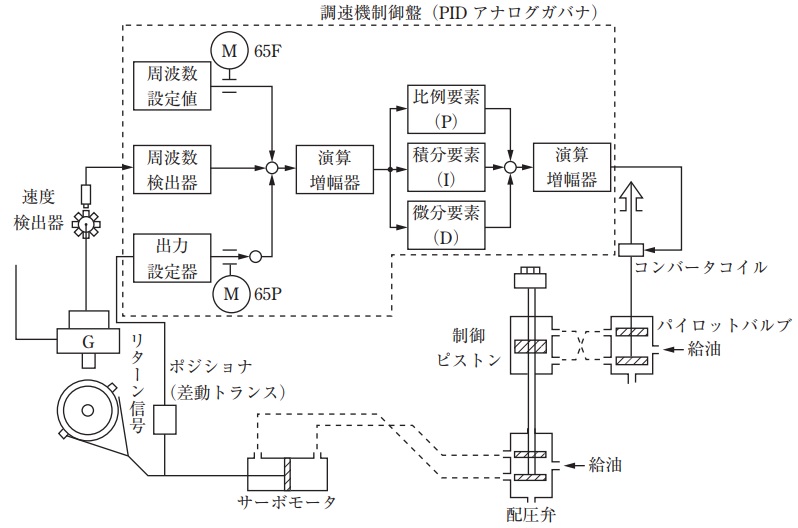
調速機の制御部は,\( \ \fbox { (1) } \ \)等からの電気信号により周波数を検出する部分,目標となる\( \ \fbox { (2) } \ \)を設定する部分,基準周波数を設定する部分,ガイドベーン\( \ \fbox { (3) } \ \)からのリターン信号から\( \ \fbox { (4) } \ \)を検出する部分,そしてアクチュエータへの指令信号を作成する演算増幅回路から構成される。
最近の大型機には\( \ \fbox { (5) } \ \)制御が用いられることが多い。\( \ \fbox { (5) } \ \)制御は,目標値と現在値の偏差に比例した制御出力を発生する比例要素,目標値に対するオフセットを埋める積分要素,目標値に迅速に近づけるための微分要素を組み合わせて,調速機の安定性と速応性を高めている。
〔問1の解答群〕
\[
\begin{eqnarray}
&(イ)& 最適レギュレータ &(ロ)& 基準電圧 &(ハ)& 配圧弁 \\[ 5pt ]
&(ニ)& \mathrm {65F} &(ホ)& 出力偏差 &(ヘ)& \mathrm {PMG} \\[ 5pt ]
&(ト)& 基準流量 &(チ)& パイロットバルブ &(リ)& 流量偏差 \\[ 5pt ]
&(ヌ)& \mathrm {PID} &(ル)& 出力 &(ヲ)& 圧力偏差 \\[ 5pt ]
&(ワ)& \mathrm {65P} &(カ)& \mathrm {PI} &(ヨ)& サーボモータ \\[ 5pt ]
\end{eqnarray}
\]
【ワンポイント解説】
電気式調速機に関する問題です。
問1からかなりの難問が出題され,多くの受験生を苦しめた問題かと思います。
電気式調速機の構造はメーカーの仕様書等に記載されているレベルなので,電験対策としては概要を理解していれば十分と言えるでしょう。
1.電気式\( \ \left( \mathrm {PID} \right) \ \)調速機の動作
調速機には機械式と電気式があり,主に水車の出力や回転速度を検出して目標値との偏差をガイドベーンの開度やニードル弁の開度で調整するものです。電気式調速機の動作は以下のようになります。
① \( \ \mathrm {PMG} \ \)で回転速度を検出し,周波数を検出します。
② 演算増幅器で配圧弁を動かす信号に増幅します。
③ 電気信号を基に,コンバータコイル,パイロットバルブ等を経由して,配圧弁でサーボモータに圧油を送ります。
④ サーボモータでガイドベーンを開閉します。
⑤ サーボモータからのリターン信号から出力偏差を検出し,行き過ぎ操作をしないようフィードバックします。
出典:電気工学ハンドブック(第7版) 一般社団法人電気学会 オーム社 P.1241
【解答】
(1)解答:ヘ
題意より解答候補は,(イ)最適レギュレータ,(ニ)\( \ \mathrm {65F} \ \),(ヘ)\( \ \mathrm {PMG} \ \),(チ)パイロットバルブ,(ヨ)サーボモータ,等になると思います。
ワンポイント解説「1.電気式\( \ \left( \mathrm {PID} \right) \ \)調速機の動作」の通り,電気式調速機において周波数を検出するのは\( \ \mathrm {PMG} \ \)となります。
(2)解答:ル
題意より解答候補は,(ロ)基準電圧,(ト)基準流量,(ル)出力,等になると思います。
ワンポイント解説「1.電気式\( \ \left( \mathrm {PID} \right) \ \)調速機の動作」の通り,調速機で目標値として設定するのは出力となります。
(3)解答:ヨ
題意より解答候補は,(イ)最適レギュレータ,(ハ)配圧弁,(チ)パイロットバルブ,(ヨ)サーボモータ,等になると思います。
ワンポイント解説「1.電気式\( \ \left( \mathrm {PID} \right) \ \)調速機の動作」の通り,リターン信号を受けるのはガイドベーンのサーボモータからとなります。
(4)解答:ホ
題意より解答候補は,(ホ)出力偏差,(リ)流量偏差,(ヲ)圧力偏差,等になると思います。
ワンポイント解説「1.電気式\( \ \left( \mathrm {PID} \right) \ \)調速機の動作」の通り,サーボモータのリターン信号から得るのは出力偏差となります。
(5)解答:ヌ
題意より解答候補は,(ヌ)\( \ \mathrm {PID} \ \),(カ)\( \ \mathrm {PI} \ \),等になると思います。
比例要素\( \ \left( \mathrm {P}\right) \ \),積分要素\( \ \left( \mathrm {I}\right) \ \),微分要素\( \ \left( \mathrm {D}\right) \ \)を組み合わせて制御することを\( \ \mathrm {PID} \ \)制御といいます。










 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】







 愛知県出身 愛称たけちゃん
詳しくは
愛知県出身 愛称たけちゃん
詳しくは