Contents
【問題】
【難易度】★★★☆☆(普通)
電気車を駆動する電動機として,直流電動機が広く使われてきた。近年,パワーエレクトロニクス技術の発展によって,電気車用駆動電動機の電源として,可変周波数・可変電圧の交流を発生することができるインバータを搭載する電気車が多くなった。そのシステムでは,構造が簡単で保守が容易な\( \ \fbox { (ア) } \ \)三相誘導電動機をインバータで駆動し,誘導電動機の制御方法として滑り周波数制御が広く採用されていた。電気車の速度を目標の速度にするためには,誘導電動機が発生するトルクを調節して電気車を加減速する必要がある。誘導電動機の回転周波数はセンサで検出されるので,回転周波数に滑り周波数を加算して得た\( \ \fbox { (イ) } \ \)周波数で誘導電動機を駆動することで,目標のトルクを得ることができる。電気車を始動・加速するときには\( \ \fbox { (ウ) } \ \)の滑りで運転し,回生制動によって減速するときには\( \ \fbox { (エ) } \ \)の滑りで運転する。最近はさらに電動機の制御技術が進展し,誘導電動機のトルクを直接制御することができる\( \ \fbox { (オ) } \ \)制御の採用が進んでいる。また,電気車用駆動電動機のさらなる小形・軽量化を目指して,永久磁石同期電動機を適用しようとする技術的動向がある。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる語句として,正しいものを組み合わせたのは次のうちどれか。
\[
\begin{array}{cccccc}
& (ア) & (イ) & (ウ) & (エ) & (オ) \\
\hline
(1) & かご形 & 一 次 & 正 & 負 & ベクトル \\
\hline
(2) & かご形 & 一 次 & 負 & 正 & スカラ \\
\hline
(3) & かご形 & 二 次 & 正 & 負 & スカラ \\
\hline
(4) & 巻線形 & 一 次 & 負 & 正 & スカラ \\
\hline
(5) & 巻線形 & 二 次 & 正 & 負 & ベクトル \\
\hline
\end{array}
\]
【ワンポイント解説】
三相誘導電動機を用いた電気車の駆動に関する問題ですが,ほとんど誘導電動機の特性を問う問題です。
(オ)の空欄は専門性の強い内容となりますので,(ア)~(エ)の空欄で正答を導きだすようにしましょう。
1.三相誘導電動機の回転子
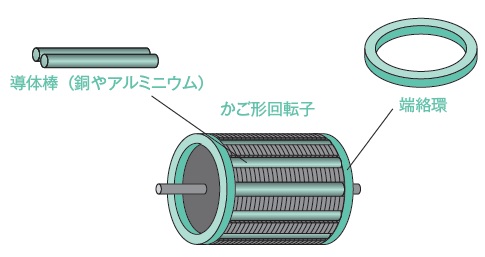
①かご形
かごの形をした導体中に,透磁率の高い鉄心を入れ,両端を端絡環で接続したものです。
構造が簡単で,頑丈かつコンパクトである特徴があります。
出典:みんなが欲しかった!電験三種 機械の実践問題集P.65 TAC出版
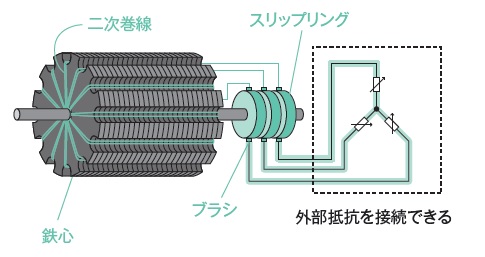
②巻線形
鉄心の外側のスロットに二次巻線を挿入した構造の回転子です。
二次巻線はスリップリングを介して外部の抵抗に接続できるという特徴があります。
出典:みんなが欲しかった!電験三種 機械の実践問題集P.65 TAC出版
2.滑りの違いによる電動機の動作の違い
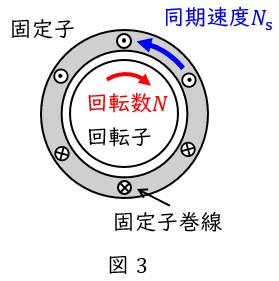
①\( \ s<0 \ \)のとき
\( \ N>N_{\mathrm {s}} \ \)となるので,同期速度\( \ N_{\mathrm {s}} \ \)よりも回転速度\( \ N \ \)が高い状態で,どちらも同方向に回転している状態です。このとき,誘導機は誘導発電機として働き,回生制動となり電源側に電力が返還されます。
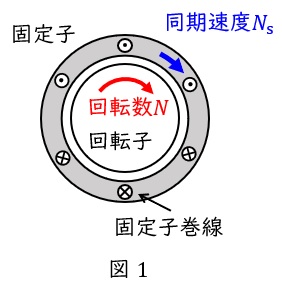
②\( \ 0<s<1 \ \)のとき
\( \ N<N_{\mathrm {s}} \ \)となるので,同期速度\( \ N_{\mathrm {s}} \ \)よりも回転速度\( \ N \ \)が低い状態で,どちらも同方向に回転している状態です。このとき,誘導機は誘導電動機として働き,電源から電力が供給されます。

③\( \ s>1 \ \)のとき
回転速度\( \ N \ \)に対し同期速度\( \ N_{\mathrm {s}} \ \)が逆向きに回転している状態で,このとき逆向きに大きなトルクがかかります。このとき,誘導機は誘導ブレーキとして働き,入力は熱として消費されます。回生制動より大きなトルクがかかるので,ブレーキとして使用します。
【解答】
解答:(1)
(ア)
ワンポイント解説「1.三相誘導電動機の回転子」の通り,構造が簡単で保守が容易なのはかご形三相誘導電動機となります。
(イ)
誘導電動機の回転周波数に滑り周波数を加算したものは同期速度で回転する一次周波数です。
回転子が滑り\( \ s \ \)で回転しているとき,一次周波数を\( \ f \ \mathrm {[Hz]} \ \)とすると,誘導電動機の回転周波数は\( \ \left( 1-s\right) f \ \mathrm {[Hz]} \ \),滑り周波数は\( \ s f \ \mathrm {[Hz]} \ \)となります。
(ウ)
ワンポイント解説「2.滑りの違いよる電動機の動作の違い」の通り,電気車を始動・加速するときには\( \ 0<s<1 \ \)すなわち正の滑りで運転します。
(エ)
ワンポイント解説「2.滑りの違いよる電動機の動作の違い」の通り,回生制動によって減速するときには\( \ s<0 \ \)すなわち負の滑りで運転します。
(オ)
誘導電動機のトルクを直接制御することができる技術をベクトル制御といい,トルクを発生する電流成分と回転子に磁束を発生させる電流成分を分け,それぞれ個別に制御できる技術です。
原理はかなり専門性が強いので,興味のある方は専門書等を勉強してみて下さい。