Contents
【問題】
【難易度】★★☆☆☆(やや易しい)
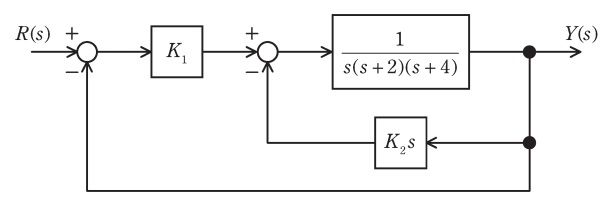
図のようなフィードバック制御系について,次の問に答えよ。ここで,\( \ R(s) \ \)と\( \ Y(s) \ \)は,それぞれ目標値\( \ r(t) \ \)と制御量\( \ y(t) \ \)のラプラス変換である。
(1) 目標値\( \ R(s) \ \)から制御量\( \ Y(s) \ \)までの閉ループ伝達関数\( \ W(s) \ \)を求めよ。
(2) この閉ループ系の特性根のうちの二つを\( \ -1 \ \),\( \ -2 \ \)とするためには,\( \ K_{1} \ \)及び\( \ K_{2} \ \)の値をいくらにすればよいか。また,このときのその他の特性根も求めよ。
(3) 小問(2)で得られた\( \ K_{1} \ \)及び\( \ K_{2} \ \)を用いて,単位インパルス応答\( \ y(t) \ \)を求めよ。
【ワンポイント解説】
時間が足りないと呼ばれる機械制御科目において,この問題を選択できスムースに解けると15分程度で解けるようになります。自動制御を勉強に取り入れ,本問を選択できた受験生が大きく合格に近づいたのではないかと思います。
1.基本的なラプラス変換
\( \ f(t) \ \)のラプラス変換を\( \ F(s) \ \)とすると以下のような関係があります。
\[
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
a & \displaystyle \frac {a}{s} \\[ 5pt ]
t & \displaystyle \frac {1}{s^{2}} \\[ 5pt ]
\mathrm {e}^{at} & \displaystyle \frac {1}{s-a} \\[ 5pt ]
\cos \omega t & \displaystyle \frac {s}{s^{2}+\omega ^{2}} \\[ 5pt ]
\sin \omega t & \displaystyle \frac {\omega }{s^{2}+\omega ^{2}} \\[ 5pt ]
\hline
\end{array}
\]
2.単位インパルス応答
単位インパルス応答は,
\[
\begin{eqnarray}
\delta (t)
=
\begin{cases}
1 & ( t = 0 ) \\
0 & ( t ≠ 0 )
\end{cases}
\end{eqnarray}
\]
という関数であり,そのラプラス変換は,
\[
\begin{eqnarray}
\mathcal{L}[\delta (t)] &=& 1 \\[ 5pt ]
\end{eqnarray}
\]
となります。この関係は覚えておく必要があります。
【解答】
(1)目標値\( \ R(s) \ \)から制御量\( \ Y(s) \ \)までの閉ループ伝達関数\( \ W(s) \ \)
\( \ K_{1} \ \)の出力を\( \ X(s) \ \)と置くと,
\[
\begin{eqnarray}
\left\{
\begin{array}{l}
\left[ R(s) -Y(s)\right] K_{1} = X(s) & ・・・・・・・・・ ①& \\[ 5pt ]
\left[ X(s) -K_{2}sY(s)\right] \displaystyle \frac {1}{s ( s+2 ) ( s+4 ) }=Y(s) & ・・・・・・・・・ ②& \\[ 5pt ]
\end{array}
\right.
\end{eqnarray}
\]
の関係があるので,①を②に代入して整理すると,
\[
\begin{eqnarray}
\left[ \left\{ R(s) -Y(s)\right\} K_{1} -K_{2}sY(s)\right] \displaystyle \frac {1}{s ( s+2 ) ( s+4 ) }&=&Y(s) \\[ 5pt ]
K_{1}R(s) – \left( K_{1} +K_{2}s\right) Y(s)&=&s ( s+2 ) ( s+4 ) Y(s) \\[ 5pt ]
K_{1}R(s)&=& ( s^{3}+6s^{2}+8s ) Y(s) +\left( K_{1} +K_{2}s\right) Y(s) \\[ 5pt ]
K_{1}R(s)&=& \left[ s^{3}+6s^{2}+\left( K_{2}+8\right) s+K_{1} \right] Y(s) \\[ 5pt ]
\frac {Y(s)}{R(s)}&=&\frac {K_{1}}{s^{3}+6s^{2}+\left( K_{2}+8\right) s+K_{1}} \\[ 5pt ]
W(s)&=&\frac {K_{1}}{s^{3}+6s^{2}+\left( K_{2}+8\right) s+K_{1}} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。
(2)特性根のうちの二つを\( \ -1 \ \),\( \ -2 \ \)とするための\( \ K_{1} \ \)及び\( \ K_{2} \ \)の値,またその他の特性根
(1)解答式より,特性方程式は,
\[
\begin{eqnarray}
s^{3}+6s^{2}+\left( K_{2}+8\right) s+K_{1}&=&0 \\[ 5pt ]
\end{eqnarray}
\]
となり,特性根は上式の解である。もう一つの特性根を\( \ -a \ \)とすると,
\[
\begin{eqnarray}
\left( s+1\right) \left( s+2\right) \left( s+a\right) &=&0 \\[ 5pt ]
\end{eqnarray}
\]
の関係があり,これと特性方程式の左辺が一致しなければならない。したがって,左辺を展開すると,
\[
\begin{eqnarray}
\left( s^{2}+3s+2\right) \left( s+a\right) &=&0 \\[ 5pt ]
s^{3}+\left( a+3\right) s^{2}+\left( 3a +2\right) s +2a &=&0 \\[ 5pt ]
\end{eqnarray}
\]
となる。したがって,
\[
\begin{eqnarray}
\left\{
\begin{array}{l}
a+3 = 6 & ・・・・・・・・・ ③& \\[ 5pt ]
3a+2 = K_{2}+8 & ・・・・・・・・・ ④& \\[ 5pt ]
2a = K_{1} & ・・・・・・・・・ ⑤& \\[ 5pt ]
\end{array}
\right.
\end{eqnarray}
\]
となるので,これより\( \ a=3 \ \),\( \ K_{1}=6 \ \),\( \ K_{2}=3 \ \)と求められる。したがって,その他の特性根は\( \ -3 \ \)と求められる。
(3)単位インパルス応答\( \ y(t) \ \)
(2)の解答を伝達関数の式に代入すると,
\[
\begin{eqnarray}
\frac {Y(s)}{R(s)}&=&\frac {6}{s^{3}+6s^{2}+11s+6} \\[ 5pt ]
\end{eqnarray}
\]
となる。ワンポイント解説「2.単位インパルス応答」の通り,単位インパルス応答のラプラス変換\( \ R(s) \ \)は\( \ 1 \ \)となるので,それを代入すると,
\[
\begin{eqnarray}
Y(s)&=&\frac {6}{s^{3}+6s^{2}+11s+6} \\[ 5pt ]
\end{eqnarray}
\]
となる。上式を変数分離する。特性根が\( \ -1 \ \),\( \ -2 \ \),\( \ -3 \ \)であるから,
\[
\begin{eqnarray}
Y(s)&=&\frac {6}{\left( s+1\right) \left( s+2\right) \left( s+3\right) } \\[ 5pt ]
\end{eqnarray}
\]
となり,右辺を
\[
\begin{eqnarray}
Y(s)&=&\frac {A}{s+1}+\frac {B}{s+2}+\frac {C}{s+3} \\[ 5pt ]
\end{eqnarray}
\]
と置き,展開すると,
\[
\begin{eqnarray}
Y(s)&=&\frac {A\left( s^{2}+5s+6\right) +B\left( s^{2}+4s+3\right) +C\left( s^{2}+3s+2\right) }{\left( s+1\right) \left( s+2\right) \left( s+3\right) } \\[ 5pt ]
&=&\frac {\left( A+B+C\right) s^{2}+\left( 5A +4B+3C \right) s+\left( 6A+3B+2C\right) }{\left( s+1\right) \left( s+2\right) \left( s+3\right) } \\[ 5pt ]
\end{eqnarray}
\]
となる。これより,
\[
\begin{eqnarray}
\left\{
\begin{array}{l}
A+B+C = 0 & ・・・・・・・・・ ⑥& \\[ 5pt ]
5A +4B+3C = 0 & ・・・・・・・・・ ⑦& \\[ 5pt ]
6A+3B+2C = 6 & ・・・・・・・・・ ⑧& \\[ 5pt ]
\end{array}
\right.
\end{eqnarray}
\]
となる。⑥より\( \ C=-A-B \ \)であるから,これを⑦,⑧に代入すると,
\[
\begin{eqnarray}
\left\{
\begin{array}{l}
2A +B= 0 & ・・・・・・・・・ ⑦^{\prime }& \\[ 5pt ]
4A+B = 6 & ・・・・・・・・・ ⑧^{\prime }& \\[ 5pt ]
\end{array}
\right.
\end{eqnarray}
\]
となり,これより,\( \ A=3 \ \),\( \ B=-6 \ \),\( \ C=3 \ \)が求められる。したがって,
\[
\begin{eqnarray}
Y(s)&=&\frac {3}{s+1}-\frac {6}{s+2}+\frac {3}{s+3} \\[ 5pt ]
\end{eqnarray}
\]
となるので,これをラプラス逆変換すれば,
\[
\begin{eqnarray}
y(t)&=&3\mathrm {e}^{-t}-6\mathrm {e}^{-2t}+3\mathrm {e}^{-3t} \\[ 5pt ]
\end{eqnarray}
\]
と求められる。









 【令和8年度版2種一次試験】
【令和8年度版2種一次試験】